

Programmable Assembly With Universally Foldable Strings (Moteins). 12 pages, 2011. Understanding how linear strings fold into 2-D and 3-D shapes has been a long sought goal in many fields of both academia and industry. This paper presents a technique to design self-assembling and self-reconfigurable systems that are composed of strings of very simple robotic modules. We show that physical strings that are composed of a small set of discrete polygonal or polyhedral modules can be used to programmatically generate any continuous area or volumetric shape. These modules can have one or two degrees of freedom (DOFs) and simple actuators with only two or three states.We describe a subdivision algorithm to produce universal polygonal and polyhedral string folding schemas, and we prove the existence of a continuous motion to reach any such folding. This technique is validated with dynamics simulations as well as experiments with chains of modules that pack on a regular cubic lattice. We call robotic programmable universally foldable strings “moteins” as motorized proteins.
We see three main topics for future work with this type of folding string: initial selection of a space-filling curve from the space of curves that are possible for a given shape, further work on motion planning, and applications.
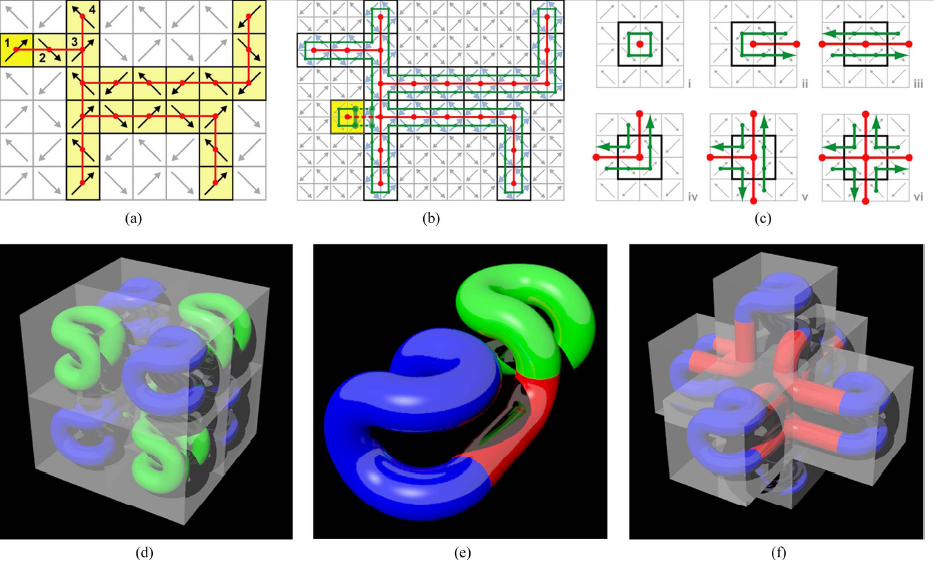
(a) Spanning tree is shown with red lines that connect the nodes (red dots) at the center of each “pixel.” (b) Subdivision of each pixel into four “subpixels,” each group of which forms a Hamiltonian path, and any assembly of which contains a Hamiltonian path (the yellow tile shows the construction by the addition of new tiles). (c) Six possible “pixel” configurations and their “subpixels” demonstrating edge connectivity. (d) Eight cubic voxels, arranged in constructive lattice, each comprised of eight cubic subvoxels with Hamiltonian loops of connectivity shown in green and blue. (e) Constructive connection between two paths to make a circuit that includes all subvoxels of the original two. (f) Fully face connected voxel, connected to all six adjacent voxels, enabling a connected path to all surrounding voxels from any given voxel.
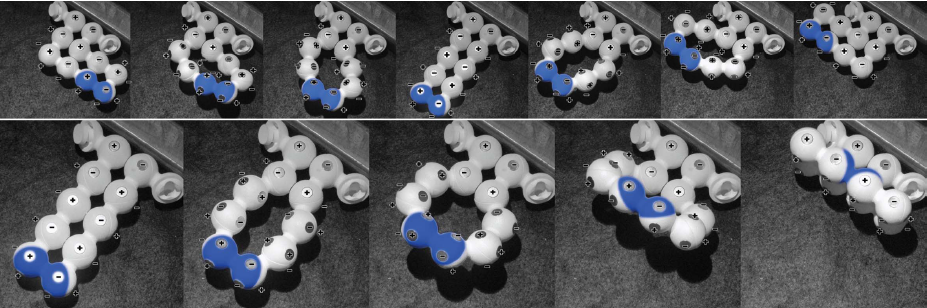
Kinematic scaling with subloops, showing the ability to perform translation (top) and rotation (bottom) routines with closed kinematic loops of the universally foldable chain.
We have shown a technique to design universally foldable string robots, with proof of existence of continuous motion for self-assembly and self-reconfiguration. These results may further the revolution from analog to digital materials and fabrication processes, through computational tools to employ biologically inspired assembly systems and by enabling low cost and reversible de novo systems.We know how to make communication and computation systems that scale well enough to operate as designed, with Avogadran numbers of units. This is largely achieved through error reduction and correction strategies that make good bets on the physics of the system. Biology shows
that these goals can be satisfied in a system to fabricate things or “programming matter,” through the encoding of structural and functional information in 1-D, with a small and discrete set of parts. Furthermore, there is some evidence to indicate that complex biological structures can result from the aggregated behavior of large quantities of discrete components with ever simpler physical models. Reconfigurable robotics has come a long way and has a long and interesting road ahead, that is, toward successful programmed assembly of very large and complex structures; we hope that the techniques presented here will be useful as a method of programmatically making vast libraries of parts from any very basic set of mechanisms. In the shorter term, we hope that with these techniques and the simplifications afforded by having an integral backbone and very low DOF and states per unit, many existing reconfigurable robotics benchmarks might be surpassed—such as the number of active modules in a single system, actuated module size (smallness), and robustness of self reconfiguration. Acrux of many existing reconfigurable robotics systems is the reconfigurable communications and power connections (the ability for modules to attach and detach from each other)—these are difficult and expensive to build; our robots (moteins) are not reliant on such mechanisms.Clearly, the most exciting and most open problem is that of applications. This technique of algorithmic generation of programs for self-folding matter presents a new method of working toward truly digital artificial fabrication systems. The old question that we strive to answer is how we can effectively and efficiently get from a description of an object to the functional object itself, with an eye toward material life cycles. This study suggests a manner to describe objects by their generative programs so that the description itself is also the very digital information needed to fabricate the object.
Ongoing work is aimed toward addressing folding strategies, including reconfiguration motion planning and the advantages of different geometric properties of the initial lattice used. 2-D and 3-D patchworks of polygons and polyhedra allow for a final result with tuned sparseness and correspondingly faster folding times (due to decreased string length). Other relevant ongoing work includes analysis of bulk properties of these kinds of assemblies, development of actuators specifically geared toward this application, and cellular computing based models for executing programs across these kinds of modules (such as to compute reconfiguration strategy) with extremely low per-unit cost.
Programs and open source code that execute the algorithms described in this paper are available for research and educational use from the authors.
If you liked this article, please give it a quick review on ycombinator or StumbleUpon. Thanks

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.