

FBO – DARPA has provided $1.25 million for Softwear Automation to develop a complete work-cell called a Beta Unit for fully automated sewing. That includes a numerically controlled sewing machine that tracks fabric movement by observing passing threads and under servo control moves the fabric under the needle stitch by stitch. Complete production facilities that produce garments with zero direct labor is the ultimate goal.
The military’s annual clothing budget at $4 billion dollars and employs about 50,000 people.
The US annual import of sewn items is approximately $100 Billion per year.
The technology proposed appears to allow cutting and sewing at costs LESS THAN in China. There is only one basic innovation required; that the metric of motion should not be meters or inches but rather thread count in the fill and warp directions. (Wovens and leather like materials need a slightly different measure.) This leads to THREE fundamental technical issues that have largely been solved and discussed below as well as more routine engineering development.
Software Automation website is here
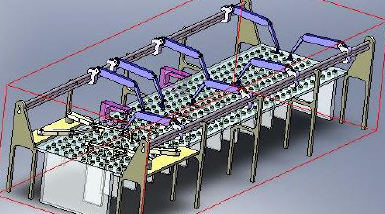
The automation process proposed by Dickerson works something like this. First, an “overhead, pick-and-place robot” grabs the necessary pieces of fabric and places them at the head of a sewing machine. The appliance itself would be equipped with “machine vision” capabilities, specific enough to spot and track individual fabric threads. That intel would “provide fabric location information” to actuators that operate the sewing machine’s needle and thread, and “budgers” — motorized balls, underneath the sewing machine that latch onto the fabric via vacuum seal — that move the material to and fro.
Automated Garment Manufacturing System Using Novel Sensing and Acuation (10 pages, 2010)
Attempts to automate the sewing process of garment manufacturing have employed substitutes for human guidance of fabric into somewhat conventional sewing machines. A new approach has been proposed and partially verified in prototype form. It consists of several subsystems responsible for 1) gross fabric motion, 2) precision detection of the fabric location and 3) exact placement of the needle in the fabric. Gross motion employs steerable rollers capable of moving the fabric. Fine fabric motion employs vision sensing technology to count threads in the fabric. Exact placement employs servo controlled dogs for moving the fabric to exactly place the needle. This paper will explain the concept and the extent of verification of its realization.
Based on the work to date, the approach proposed seems to be technically feasible, although additional work on the thread counting vision system is needed and is underway. It also appears that the approach can be economically viable, based on other evaluations. Obviously, a fully functioning, integrated system will demand much more work and significant funding.
If you liked this article, please give it a quick review on ycombinator or StumbleUpon. Thanks

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.