

Hermes can punch through drywall, smash fizzy drink cans, kick things over and karate chop things in half.
HERMES is operated by a person wearing an exoskeleton, and the reasons his reflexes are so “human” is because he is, in fact, mimicking precisely the actions of that person. When the exoskeleton wearer punches, HERMES does too.
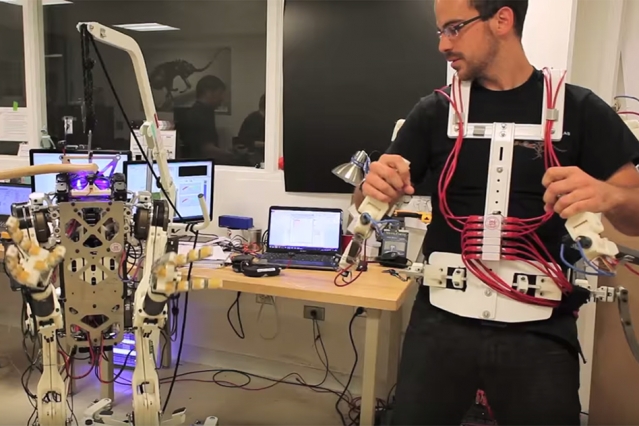
PhD student Joao Ramos demonstrates the Balance Feedback Interface, a system that enables an operator to control the balance and movements of a robot, through an exoskeleton and motorized platform. Photo: Melanie Gonick/MIT
Ramos says the interface takes advantage of a human’s split-second reflexes, which give the robot much faster reaction times than robots that adjust their balance based on visual feedback from onboard cameras.
“The processing of images is typically very slow, so a robot has difficulty reacting in time,” says Ramos, of MIT’s Department of Mechanical Engineering. “Instead, we’d like to use the human’s natural reflexes and coordination. An example is walking, which is just a process of falling and catching yourself. That’s something that feels effortless to us, but it’s challenging to program into a robot to do it both dynamically and efficiently. We want to explore how humans can take over complex actions for the robot.”
Ultimately, Ramos and his colleagues envision deploying HERMES to a disaster site, where the robot would explore the area, guided by a human operator from a remote location.
“We’d eventually have someone wearing a full-body suit and goggles, so he can feel and see everything the robot does, and vice versa,” Ramos says. “We plan to have the robot walk as a quadruped, then stand up on two feet to do difficult manipulation tasks such as open a door or clear an obstacle.”

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.