
In Jules Verne’s classic science fiction, Journey to the Center of the Earth, Professor Otto Lidenbrock and his company descend into an Icelandic volcano to explore it in the name of science, discover a vast subterranean ocean among other unexpected wonders, and must resiliently survive the experience to complete their mission. This is exactly what we want to do in reality on Europa and Enceladus. Several concepts have already been studied to explore these moons’ subsurface oceans using autonomous underwater vehicles (AUVs). However, access to subsurface ocean remains to be an outstanding challenge. The proposed concept is to deploy a surface-to-subsurface robotic system, namely Icy-moon Cryovolcano Explorer (ICE), which will land on the surface of an icy moon, traverse to a cryovolcano, descend into its opening, perform in-situ science in the vent or crevasse, and ultimately deploy underwater vehicles to explore a subsurface ocean.
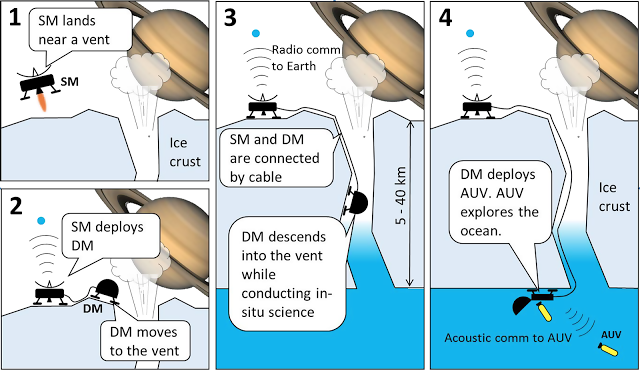
ICE involves three modules: Descent Module (DM), Surface Module (SM), and AUVs. DM carries AUVs and descends into a vent by using a combination of roving, climbing, rappelling, and hopping, like an experienced human alpinist. The estimated gas density of an ejecting plume is sufficiently low, therefore its dynamic pressure (< 1 Pa) would not be an obstacle for descent. SM stays on the surface, generates power by RTG and/or solar cells, and communicates with Earth. DM relies on the power and communication link provided by SM through a cable to minimize the size and weight. It is a highly autonomous agent being capable of quickly responding to a dynamically changing environment, such as episodic eruption, and resiliently handling any anomalies under significant communication latency. Once DM reaches the subsurface ocean, it launches the AUVs to explore the exotic environment that potentially harbors life. ICE brings three unique benefits.
1. it enables in-situ science in a cryovolcano vent. Although orbiters can perform in-situ science of plumes, relatively large (up to 1 μm) dust grains are hard to reach orbital altitude. Yet it is those mineral grains that carry rich information about the habitability of the subsurface ocean.
2. ICE enables the exploration of subsurface oceans by providing an access to it.
3. it enables the operation of AUVs in subsurface ocean by providing three essential services: communication, localization, and power. Since water blocks radio waves, communication and localization are particularly significant challenges for AUVs. DM of ICE communicates with AUVs though acoustic communication. DM then transfers the data though an optic cable to SM, from which the data is transmitted to Earth by radio. DM also sends an acoustic localization beacon and serves as a battery charging station, potentially unnecessitating RTG on the AUV.
In the proposed study we will
(1) develop mission concepts for ICE,
(2) identify the primary risks associated with the mission, and identify potential mitigations for these risks, and
(3) perform a feasibility analysis for the mission, which will include performing several system trades, including one focused on the hardware platform (e.g., climbing robot vs. repelling robot vs. hovering robot), and another one focused on the autonomy software capabilities (with the goal to identify the appropriate scope of the autonomous functionality required to execute the mission concepts).
These tasks will result in identifying driving requirements for the system, including candidate science targets, power needs, resilience needs, etc. In summary, we will develop a concept for ICE that elaborates and refines the science and exploration benefits descried above, and we will analyze the benefits and risks associated with realizing this concept. A successful completion of the project will mature this exciting concept into a credible element of the growing outer planets and icy moons exploration portfolio.
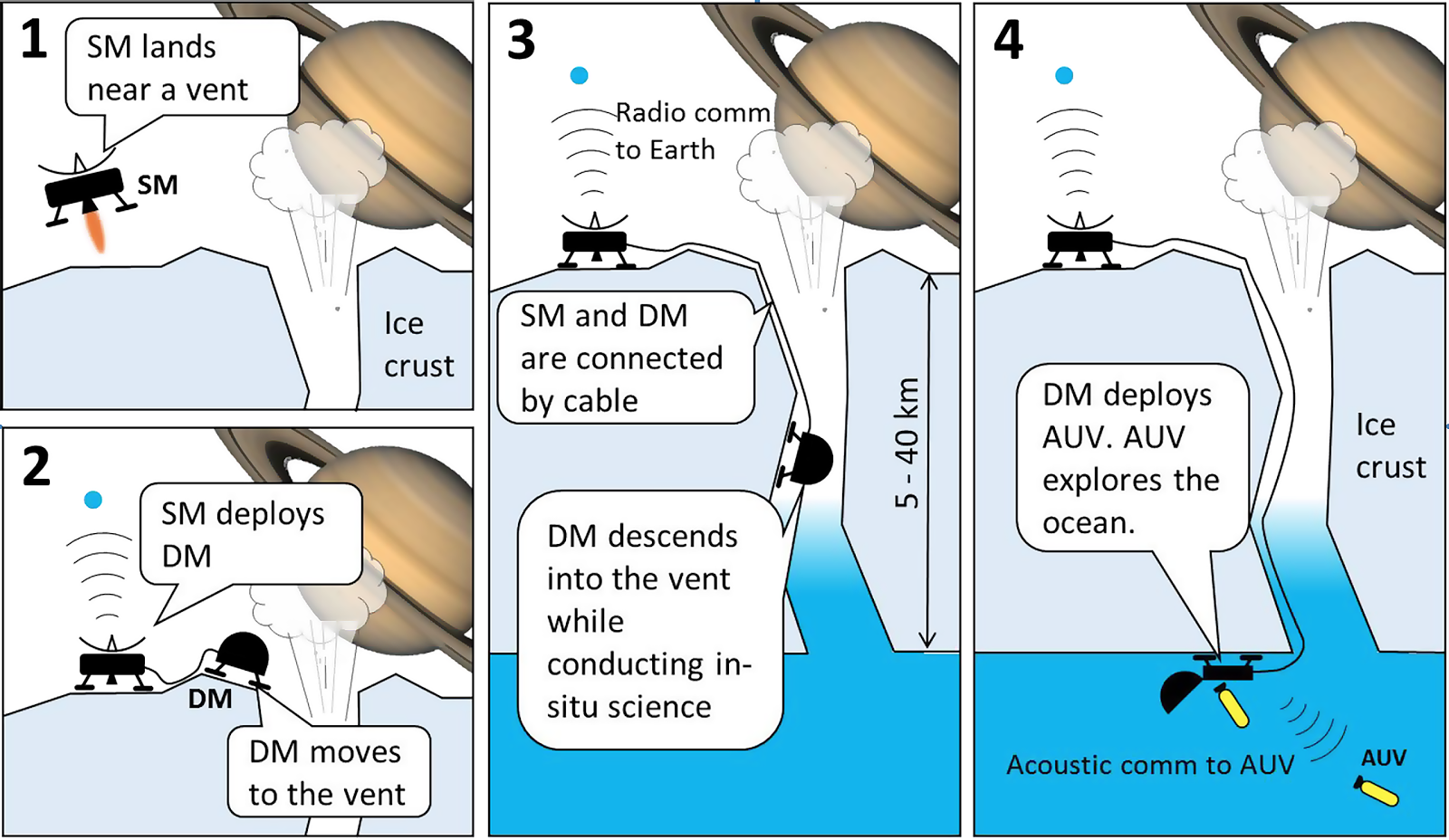
Icy-moon Cryovolcano Explorer (ICE) consists of three modules: Descent Module (DM), Surface Module (SM), and autonomous underwater vehicles (AUVs). DM descends into a vent by using a combination of roving, climbing, rappelling, and hopping, while SM stays on the surface to generates power and communicate with Earth. Once DM reaches the subsurface ocean, it launches the AUVs to explore the exotic environment that potentially harbors life. Credits: JPL/Caltech

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.