

A patent by Ido Bachelet and his team for a system acting as logic gates and systems exhibiting quorum sensing. The systems comprise at least one effector nucleic acid origami device, at least one regulator nucleic acid origami device, at least one input and at least one output. The nucleic acid origami devices are non-immunogenic and / or resistant to nucleases.
2014 paper from Nature Nanotechnology, Universal computing by DNA origami robots in a living animal
They tested DNA nanorobots controlled by a gate that opens if and only if two cues were present. These DNA robots emulate a logical AND gate. Other DNA robots and systems of robots emulated OR, XOR, NAND, NOT, CNOT, and a half adder. This was described in 2014 but this article provides the 2014 research paper details and the 2016 patent.
The system can be plausibly scaled to exceed the capacity of older 8-bit computers such as Commodore 64 or Atari 800.
Biological systems are collections of discrete molecular objects that move around and collide with each other. Cells carry out elaborate processes by precisely controlling these collisions, but developing artificial machines that can interface with and control such interactions remains a significant challenge. DNA is a natural substrate for computing and has been used to implement a diverse set of mathematical problems, logic circuits and robotics. The molecule also naturally interfaces with living systems, and different forms of DNA-based biocomputing have previously been demonstrated. Here we show that DNA origami can be used to fabricate nanoscale robots that are capable of dynamically interacting with each other in a living animal. The interactions generate logical outputs, which are relayed to switch molecular payloads on or off. As a proof-of-principle, we use the system to create architectures that emulate various logic gates (AND, OR, XOR, NAND, NOT, CNOT, and a half adder). Following an ex vivo prototyping phase, they successfully employed the DNA origami robots in living cockroaches (Blaberus discoidalis) to control a molecule that targets the cells of the animal.
DNA origami nanorobots described previously. These robots are controlled by a gate that opens in response to a correct combination of protein cues, which bind a sensing strand, typically an aptamer, and displace it from its complementary strand. Upon displacing the gate strands from each other the robot undergoes a drastic conformational shift, exposing the payload inside it and making it available to engage target cells. Here, these payloads mediate and control collisions between robots as described below.
In our design, the gate can be opened also by an external DNA key, which hybridizes with the complementary strand in the gate, displacing the sensing strand by toehold-mediated migration and activating the robot. This DNA key can now be mounted as payload into one robot, such that when this robot is active, the strand can access the gate of an adjacent robot, subsequently altering its state to active as well. This assigns a “positive regulator” (P) phenotype to the robot loaded with the external key. A “negative regulator” (N) phenotype can be assigned as well: here, the first robot is loaded with DNA clasps that cross-link two juxtaposed sides of the second robot’s gate, forcing it to close or preventing it from becoming open. These dynamic DNA interactions were designed and simulated using visual DSD
They designed various architectures by mixing P and N robots with effector (E) robots at defined ratios in the presence or absence of their cognate protein cues. To demonstrate this platform in a living biological system, they used living adult Blaberus discoidalis as model organisms. They found this animal to be an excellent model for initial prototyping of DNA nano-devices for its very low systemic nuclease activity, small systemic volume, and chemical compatibility with DNA structures. After loading E robots with an antibody recognizing the insect’s hemocytes (the hemolymph cells analogous to human white blood cells), robot mixtures were tested on freshly isolated hemocytes and then injected into the living animals
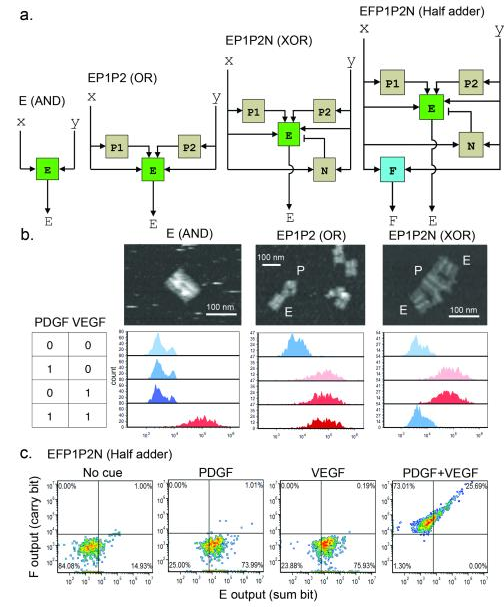
Robots emulating AND, OR and XOR gates in a living animal. A, schematic architecture representations. E robots (first from left) are equivalent to an AND gate, requiring both X and Y (in this study PDGF and VEGF, respectively) to open. EP1P2 architecture (second from left) functions as an OR gate, requiring either X, Y, or both to open. EP1P2N architecture (third from left) functions as a XOR gate, opening with either X or Y, but closing with both X and Y. EFP1P2N (right) emulates a half adder encoding the sum bit in E and carry bit in F. B, Top panels, AFM images (bars in nm) of robot architectures. Below every image is the corresponding flow cytometric analysis of insect cells isolated from B. discoidalis several hours following the injection of robots and appropriate keys. The table on the left shows key combination corresponding to each row of the histograms. E robots (FL1 channel) were tagged with FAM. Blue/red peaks represent negative/positive signals, respectively. C, flow cytometric analysis of the EFP1P2N architecture, emulating a half adder. E robots representing the sum bit (FL1 channel) and F robots (FL4 channel) representing the carry bit of the half adder were measured simultaneously in-vivo using FAM and Cy5 tagged robots. 1,000 hemocytes were collected for each experiment.
DNA Origami Computing Patent
The invention relates in general to systems of molecular origami devices and their uses for molecular computing, quorum sensing and programmable drug delivery.
Inspired by communication mechanisms occurring in biological systems, molecular communication (MC) is a novel interdisciplinary paradigm in which the research areas of biotechnology, communication technology and nanotechnology converge [Hiyama, S. et al., 2005]. The rapid advances in these fields have brought about the miniaturization of mobile machines and robots down to nanometer dimensions. At this scale, a bio-inspired nanorobot (nanobot in short) is the most basic functional unit, consisting of nanoscale components, that is capable of performing specific tasks such as computing, data storing, sensing or actuation.. Such tasks can be executed through the capacity of receiving inputs and generating outputs, which in a molecular communication context requires transceiver capabilities, as nanobots receive information by reacting to specific molecules and broadcast information by releasing other molecules, according to predefined parameters.
Different molecular communication systems have been proposed depending on the way message molecules propagate from transmitters to receivers [Pierobon, M. et al., 2010].
Molecular communication systems have been categorized into three classifications:
- walkway-based,
- diffusion based and
- flow-based Molecular Communication (MC).
For each category, several efforts have been undertaken to design systems and laboratory condition feasibility has been investigated.
For walkway-based MC systems, a walkway-motor-interaction transport model has been proposed. In such systems, signal molecules are propagated over protein filaments (i.e. microtubules) via molecular motors.
Diffusion-based MC is achieved by encapsulating information molecules into vesicles that are emitted into a medium where they subsequently propagate via diffusion or unpredicted turbulence of the medium. This approach also includes systems utilizing diffusion through gap-junctions between cells and long range systems that are envisioned to make use of platforms such as hormones, pheromones, pollen or spores. There have also been accounts of a new group of longer range, actively propelled systems utilizing flagellated bacteria and catalytic nanomotor systems in which information is encoded in DNA plasmids and transmitted via bacteria or synthetic nanomotors.
In flow based MC systems, signal molecules are released into a fluid medium where they are guided to their destination via currents or drifts. Such systems offer some of the most biologically realistic scenarios; i.e. as nanomachines can be deployed in flows which introduce a drift for the motion of signal molecules, such as in hormonal communication through the blood stream. Interestingly, even though vesicle and long range hormones, pheromones, pollen or spores systems might be applicable in flow guided MC systems, no research on physical systems employing such propagation systems has been published.
The fundamental challenge is to devise a biological nanobot platform that can combine the extraordinary characteristics of nano-transceivers with application-orientated functionality. Ultimately such a system will provide the blue print for a scalable single network system that can interconnect large numbers of nanobots to perform complex tasks.
DNA Origami platform based molecular computing
General efforts in MC research have mainly focused on bio-inspired propagation systems and theoretical qualification thereof, whilst research on actual transceivers has been fairly limited. To date, two transceiver engineering approaches have been proposed; the construction of simplified artificial cell-like structures made of biological materials or adaptation of existing biological cells. In comparison, the DNA-origami platform sanctions a novel non-cell like approach to construct autonomous, logic-guided nanobots, that can be programmed to transport molecular payloads to targets.
In one aspect, the present invention relates to a system acting as a logic gate, said system comprising at least one effector device, at least one regulator device, at least one input and at least one output, wherein each one of said at least one effector device and at least one regulator device each is a nucleic acid origami device comprising a scaffold strand and a plurality of staple strands, and independently has the structure A, B or C,
wherein in the structure A:
(i) one of the staple strands comprises either
(a) an aptamer domain capable of binding to a binding partner comprising one of said at least one input;
(b) an oligonucleotide capable of binding a DNA binding protein, said DNA binding protein comprising another of said at least one input; or
(c) an oligonucleotide attached to a nano-antenna capable of receiving an electromagnetic field comprising still another of said at least one input, or one of the staple strands comprises an aptamer domain of (a) and another of the staple strands comprises an oligonucleotide of (c);
(ii) another of the staple strands comprises a latch domain hybridized or bound to said aptamer domain of (a) or oligonucleotide of (b) or (c), the latch domain sequence being selected such that the aptamer domain of (a) is capable of binding to the binding partner such that the binding partner displaces the latch domain, or the latch domain is capable of hybridizing with an external oligonucleotide selected such that it displaces the aptamer domain; said latch domain is linked to a binding partner that is selected such that it has a first configuration under a first condition and a different second configuration under a second condition, and the aptamer of (a) or the oligonucleotide of (b) is capable of binding to the binding partner having the first configuration but incapable of binding to the binding partner having the second configuration such that the latch domain is displaced from the aptamer of (a) or the oligonucleotide of (b) when the binding partner transitions from the first to the second configuration; or the nano-antenna of (c), upon receipt of said electromagnetic field, undergoes inductive coupling and subsequent heating thereby displacing the latch domain from the oligonucleotide of (c); and (iii) the aptamer domain of (a) or the oligonucleotide of (b) or (c), and the latch domain, when hybridized or bound to one another, hold the device in a closed configuration; and the device transitions to an open configuration when said aptamer domain or oligonucleotide, and the latch domain, are not hybridized or bound to one another.
SOURCE – US Patents, Nature Nanotechnology

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.