

As the computation and communication circuits we build radically miniaturize (i.e. become so low power that 1 picoJoule is sufficient to bang out a bit of information over a wireless transceiver; become so small that 500 square microns of thinned CMOS can hold a reasonable sensor front-end and digital engine), the barrier to introducing these types of interfaces into organisms will get pretty low. Put another way, the rapid pace of computation and communication miniaturization is swiftly blurring the line between the technological base that created us and the technological based we’ve created. Michel Maharbiz, University of California, Berkeley, is giving an overview (june 16, 2016) of recent work in his lab that touches on this concern. Most of the talk will cover their ongoing exploration of the remote control of insects in free flight via implantable radio-equipped miniature neural stimulating systems.; recent results with neural interfaces and extreme miniaturization directions will be discussed. If time permits, he will show recent results building extremely small neural interfaces they call “neural dust,” work done in collaboration with the Carmena, Alon and Rabaey labs.
Radical miniaturization has created the ability to introduce a synthetic neural interface into a complex, multicellular organism, as exemplified by the creation of a “cyborg insect.”
“The rapid pace of computation and communication miniaturization is swiftly blurring the line between technological base we’ve created and the technological base that created us,” explained Dr. Maharbiz. “These combined trends of extreme miniaturization and advanced neural interfaces have enabled us to explore the remote control of insects in free flight via implantable radio-equipped miniature neural stimulating systems.”

Strapping tiny computers and wireless radios onto the backs of giant flower beetles and recording neuromuscular data as the bugs flew untethered, scientists determined that a muscle known for controlling the folding of wings was also critical to steering. The researchers then used that information to improve the precision of the beetles’ remote-controlled turns.
The beetle backpack is made up of a tiny, off-the-shelf microcontroller and a built-in wireless receiver and transmitter. Six electrodes are connected to the beetle’s optic lobes and flight muscles. The entire device is powered by a 3.9-volt micro lithium battery and weighs 1 to 1.5 grams.
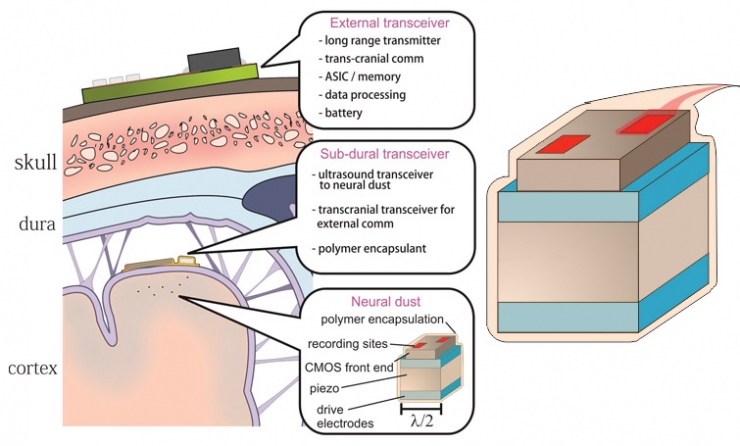
One of the major engineering challenges in the current ‘century of the brain’ is the development of chronic neuromonitoring techniques, i.e., devices that allow to monitor the brain 24 by 7, over a period of 10-20 years or longer. Such a technology would form an important breakthrough for brain-machine interfaces (BMIs), allowing to improve the quality of life of people suffering from debilitating neurological conditions. Recently, a neural recording platform based on a distributed ultrasonic backscattering system has been proposed, referred to as ’neural dust’ (ND) The ND system consists of a large number of free-floating ND motes (NDMs), which are implanted at 3mm depth in the cortex in a grid with a less than 100 µm pitch. These NDMs measure extracellular action potentials or ’spikes’ generated by neurons in their neighborhood.
Sub-dural ultrasound (US) transceiver modules, referred to as ’interrogators’, are implanted on top of the cortex (without penetrating it), to collect the spike signals recorded by the NDMs. The interrogators send a US carrier wave to the targeted NDM, which then modulates the recorded neural signal onto the reflected carrier. The interrogator then demodulates the reflected wave and sends the result to an external transceiver through near-field electromagnetic communication.
US communication is based on passive backscattering which was only allowing 10% of the neural dusts to be interrogated over a desired timeframe. An alternative approach is used where a few random (non-focal) US beam patterns are transmitted in Tx mode towards the entire grid of NDMs simultaneously, resulting in a grid-wide MIMO source separation problem.
SOURCES- Berkeley university, VLSI Symposium

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.