

Advances in robotics and additive manufacturing (3D printing) technologies are game-changing for space colonization. As a result, it has become economically feasible – as we attempt to demonstrate in this paper – to bootstrap a self-sustaining, self-expanding lunar industry that will spread across the solar system at no further expense to the Earth’s economy. Another game-changer is the discovery of lunar polar ice providing vast quantities of hydrogen, nitrogen and carbon. The Moon has every element needed for healthy industry. In light of these game-changing advances and discoveries, it is important to reassess the prospects for initiating space industry
Arxiv – Affordable, rapid bootstrapping of space industry and solar system civilization
Simple modeling was developed to identify the main parameters of successful bootstrapping. This indicates that bootstrapping can be achieved with as little as 12 metric tons (MT) landed on the Moon during a period of about 20 years. The equipment will be teleoperated and then transitioned to full autonomy so the industry can spread to the asteroid belt and beyond. The strategy begins with a sub-replicating system and evolves it toward full self-sustainability (full closure) via an in situ technology spiral. The industry grows exponentially due to the free real estate, energy, and material resources of space. The mass of industrial assets at the end of bootstrapping will be 156 MT with 60 humanoid robots, or as high as 40,000 MT with as many as 100,000 humanoid robots if faster manufacturing is supported by launching a total of 41 MT to the Moon. Within another few decades with no further investment, it can have millions of times the industrial capacity of the United States. Modeling over wide parameter ranges indicates this is reasonable, but further analysis is needed. This industry promises to revolutionize the human condition.
Once successfully bootstrapped, a robotic network can access, process, transport, and utilize the solar system’s resources for mankind’s benefit. Appropriately designed robots will not have the problems traveling the vast distances of the solar system that humans have, and they can set up the infrastructure that will enable us to follow. Within the first several decades a vital industry could be established on the Moon and in the asteroid belt using technologies that are for the most part only modestly advanced beyond today’s state-of-the-art. After that, human outposts, laboratories, and observatories can spring up everywhere between the Kuiper belt and Mercury. It can grow exponentially and provide mankind the ability to do things that today are only dreams. To make this possible very soon, the majority of technology advancement needs to occur in the automation of robotics and in additive manufacturing. Trends in these fields are hopeful, so they think the scenarios they present here are not too optimistic. Therefore, they think the space resource community has real reason to be motivated in its work. We are aiming for the possible, not the fantastical.
This paper roughly assesses how much mass and time are needed on the Moon to reach the “ignition” point of a self-sustaining and expanding industry, and it shows that the launch costs for this mass can be quite low. It does not assess the cost of developing the necessary technologies and of teleoperating them on the Moon until autonomy is achieved. While the mass and time are shown to be quite low, it might be necessary to subdivide the bootstrapping into even smaller, less expensive steps, creatively sharing them between public and private sectors. We leave that business model strategizing to future work. Also, the assessment in this paper is very rough and is intended mainly to organize our thinking on this topic, and to initiate discussion and further study within the space community. A full study will be very complex and require the involvement of a much larger group of contributors. They hope this will raise interest and lead to that more comprehensive effort in the near future.
Bootstrapping a Solar System Industry
Self-replicating systems have been studied as an innovative method to economically access space resources (Freitas and Gilbreath 1980; Tiesenhausen and Darbro 1980; Freitas and Zachary 1981; Chirikjian 2004). A 1980 summer study at the NASA Ames Research Center (Freitas and Gilbreath 1980) showed that self-reproducing machines are theoretically possible.
It discussed a straw-man self-replicator of 100 metric tons mass, including 12 tons for paving robots, 4.4 tons for mining robots, and 4 tons for mobile assembly and repair robots, to name a few examples. Freitas and Zachary (1981) also used the figure of 100 metric tons per replica. The 1980 study recommended among other things a technology development program for the enabling technologies. This program has in effect occurred during the past three decades, mostly driven by non-space, commercial industry but also in the past decade by the Constellation project. As a result, these masses per replica can be reduced. For example, the excavator masses used in this paper are only 0.35 tons for the first generation “seed” hardware, based on trade studies and our experience with robotic lunar excavators and pavers that were recently developed and field tested (Zacny et al. 2010; Mueller et al. 2009; Mueller and King 2008).
The 1980 study portrayed the seed replicator as a large factory, with warehouse operations, centralized computing, and significant facility construction. Lipson and Malone (2002) showed how Solid Freeform Fabrication technology (or additive manufacturing or 3D printing) could reduce the complexity of a space manufacturing operation. This would reduce the mass of the first seed replicator.
There are several additional strategies to reduce the launch mass of a seed replicator. The first is to identify and use only the simplest system capable of replication. The second is to avoid full “closure”. Closure is the ability to replicate all aspects of the system in space so that nothing further is required from Earth to build replicas. Nearly full closure is vastly easier to achieve than full closure (Freitas and Gilbreath 1980), because the manufacture of electronics and computer chips requires heavy, high-tech equipment that would be expensive to launch from Earth and would command much of the industry’s resources during replication. However, incomplete closure results in very high launch masses later as the industry grows exponentially, as we show below. A third strategy, which to our knowledge has not been discussed in the literature, is to begin with a simpler, sub-replicating system and evolve it toward the selfreplication capability. In this strategy, the evolving system might never become a “selfreplicator” even after it reaches full closure, because each generation can continue creating something significantly more advanced than itself. This is the strategy adopted here.
The objective is for the first robotic “colonists” on the Moon to fabricate a set of, say, 1700’s era machines and then to advance them steadily through the equivalent of the 1800’s, 1900’s, and finally back into the 2000’s. We argue that this can be accomplished in just a few decades.
There are reasons why this technological spiral will be both easier and faster than when we accomplished it on Earth. First, the majority of the technology does not need to be re-invented. The knowledge will be provided by technologists on Earth. Second, the Earth will provide material support in the early stages. We will send teleoperated robots and complex electronic assemblies prior to achieving closure. On the other hand, there will be new challenges. For example, we must gain experience in the lunar environment to learn how to adapt terrestrial technologies to it.
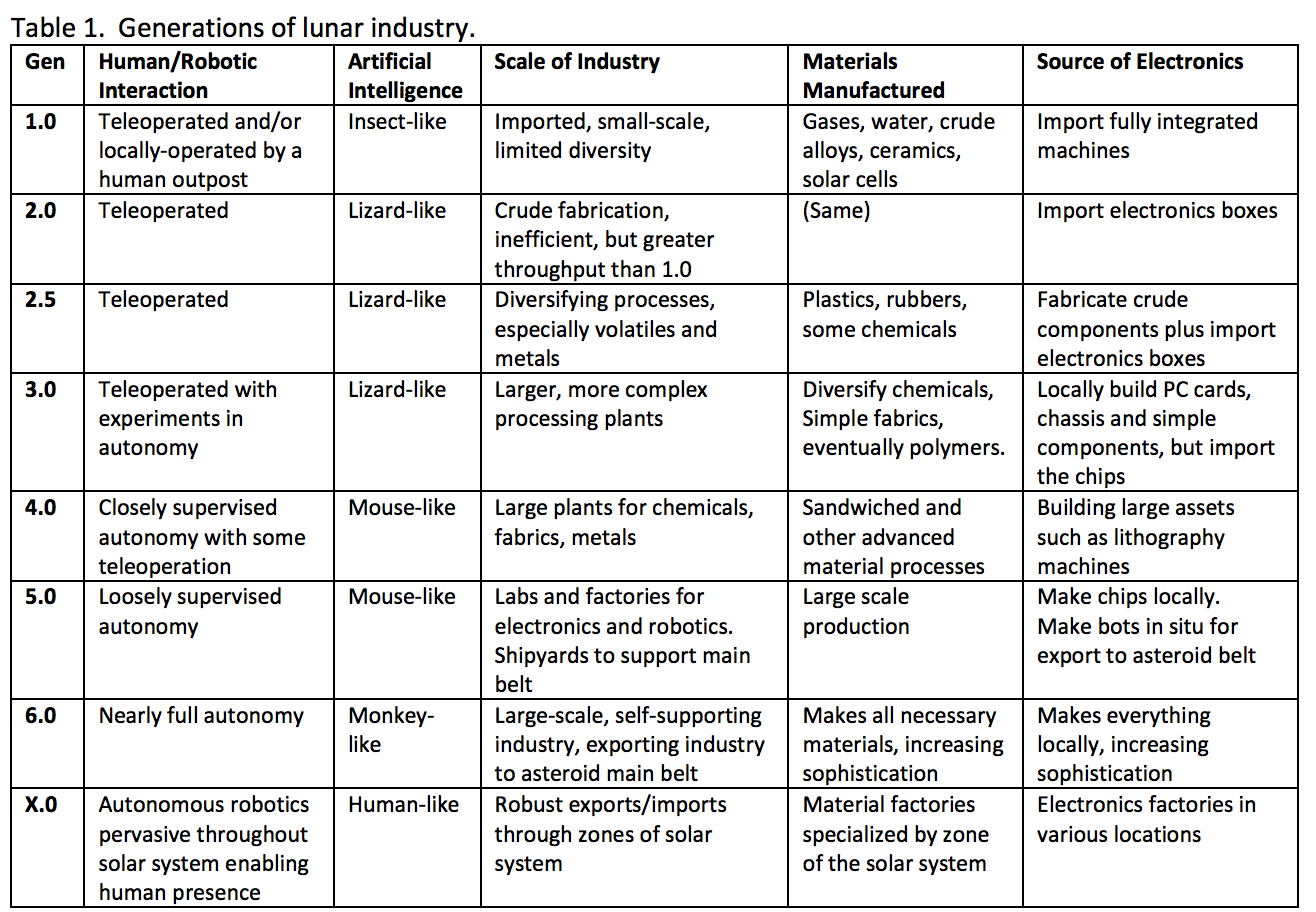
The set of assets within each generation is described below. To be conservative, we usually assume that each asset is retired at the end of its generation so that only the more modern assets of the new generation are involved in producing the generation after that (except as noted below for solar cells and robonauts). This is overly conservative, but it allows that hardware failures could disable some new assets that are unable to be repaired while assets from the prior generation continue to operate to take their place.
In Generation (“Gen”) 2.5, the use of the decimal place (rather than incrementing to 3.0) indicates that the assets of Gen 2.0 and Gen 2.5 are added cumulatively rather than retiring the Gen 2.0 hardware. We do this because it is necessary to vastly diversify materials manufacturing as quickly as possible, and this is accomplished by creating Gen 2.5 hardware that is no more sophisticated than Gen 2.0 although capable of making different materials.

Subsequent generations are modeled very simply as extrapolations from the first one using a “crudeness factor” that tells how much more massive they are due to the use of mongrel alloys and other poor materials produced from the regolith. Thus, Gen. 2.0 and Gen 2.5 have a crudeness factor of 2.5, meaning they are 2.5 times as massive as Gen. 1.0 and thus take longer to manufacture. Gen 3.0 has a crudeness factor of 1.5, but Gen. 4.0 and subsequent have a crudeness factor of 1.0.
The quantity of electronics fabricated on the Moon also evolves with the generations. For Gen. 3.0, 4.0, 5.0 and 6.0, the targets are to make 90%, 95%, 99%, and 100% of the electronics on the Moon, respectively. If these targets cannot be met, then the overall exponential growth of lunar industry can be slowed down accordingly to keep it economical.
Another model parameter is the operation time per lunation. If the solar cells are located on a “peak of eternal light” near the poles and are actuated to follow the sun, they might obtain enough power for the industry to operate through 70% of the lunation. More equatorially, they would support only 40% operation.

The evolving approach described here reduces the cost of material transported to the moon by eight times. Lower cost launch providers like Spacex are altering the cost equation.
This robotic industry in space leads to a grand vision. After the industry becomes selfsupporting it can be sent to other parts of the solar system. The asteroid belt has everything necessary for it: water, carbon, silicates, metals, oxygen, solar energy (with much larger collecting arrays), etc. The ices in the lunar poles are a limited resource so it will be important to move the center of industry to the asteroids as quickly as possible. There, the billion-fold greater resources could allow the industry to expand exponentially until it dwarfs that of the entire Earth within just a few decades. Continued advances in artificial intelligence will be needed to control and manage such a large industry. The United States economy uses 10^20 J of energy per year including fossil fuels, nuclear, and renewables (Department of Energy 2010).
Gen. 5.0 (at 70% duty cycle) using 10^15 J of energy per year. Multiplying this by a factor of 3 per year, it would exceed the energy usage of the US within 11 more years. After 12 more years it would exceed the US economy by a factor of a million. After another decade it would exceed the US economy by a factor of a billion. Somewhere within that brief period of time, humanity will have gained the ability to do everything we can dream of doing in space.
Robotic space industry will also bring great dividends back to Earth. For example, it can create space beamed solar power (SBSP) satellites in Earth orbit. Commonly it is explained that SBSP is not competitive with other energy sources due to launch costs. Robotic space industry can eliminate not only the launch costs but also the construction costs, turning it into an essentially free, clean, and highly scalable energy source.

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.