

iRobot (NASDAQ:IRBT) (maker of the millions of Roomba vacuums and military Packbots) may be on the verge of creating a new generation of robots with a much higher degree of autonomy than is currently possible. This is another example of how important the sensing systems and other non-artificial intelligence parts of a robot are to improving functionality. By giving a system better “artificial eyes” a far more capable and useful system is created without any advance in processing power or coding.
The robotics maker is announcing a deal with Santa Barbara, CA-based Advanced Scientific Concepts under which it has obtained the exclusive rights (in exchange for future purchasing commitments) to ASC’s 3-D Flash LADAR (for Laser Detection and Ranging) technology.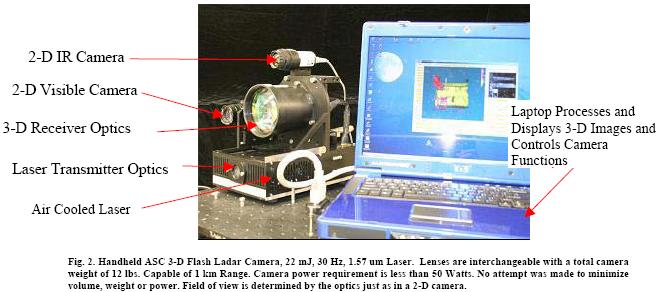
the camera and laser setup for the 3d flash ladar

Schematic design of part of the 3d flash ladar system by Advanced Scientific Concepts
Laser range detectors have been employed in the robotics community for years, Greiner points out. “In fact, we’ve done it for many, many years,” she says. The problem is, the systems are not especially rugged or durable, they’re susceptible to glare from the sun, and have trouble cutting through dust or fog. In short, they don’t do as well as they should in the extreme conditions in which they must typically be deployed.
What ASC brings to the table is a new approach to the problem. As Greiner puts it, “These guys have invented a new type of LADAR system.” The Flash-based, solid-state system has no moving parts, one factor in improving its ruggedness. Instead of scanning the terrain one line at a time like traditional LADAR, ASC’s system illuminates an entire scene at once with diffuse laser light, providing a full, instantaneous 3D picture of the territory around it. The flash technology, Greiner says, can “visually freeze the entire geometry.”
The new LADARs going not only on Packbots but larger vehicles like Humvees or even tanks. Outside the military, she envisions it enabling robot-driven tractors or other large industrial robots.
(5 pages) Three Dimensional Flash LADAR Focal Planes and Time Dependent Imaging
Accurate three-dimensional data can be acquired a frame at a time with frame rates of at least 30 Hz using a flash ladar 3-D camera invented and fabricated by ASC. Each frame of data is acquired instantaneously with respect to the mechanical motion of the objects within the 3-D flash ladar camera field of view. Although only 50 – 100 m time dependent data was presented, the static image at 1 km suggests that this data could also be acquired a many kms. The current camera has an FPA of 128 x 128 pixels but there is no technological limitation restricting the array size. Furthermore, although in general larger arrays take longer to readout, 30 Hz is certainly not the upper bound frame rate and the camera can quantitatively describe high-speed or rapidly contorting objects.
Applications of the 3-D flash camera abound and are seemingly limited only by imagination. However, the camera appears to offer an immediate breakthrough in collision avoidance or navigation of unmanned or manned vehicles. Vehicle motion can distort the 3-D image of conventionally scanned ladar system which collect a full data frame over time rather than instantaneously. By making a precision scanner unnecessary, 3-D flash ladar systems offer low weight, small size, high reliability, optical zooming and eventually low price.
FURTHER READING
Wikipedia on LIDAR
LIDAR (Light Detection and Ranging) is an optical remote sensing technology that measures properties of scattered light to find range and/or other information of a distant target. Other terms for LIDAR include ALSM (Airborne Laser Swath Mapping) and laser altimetry. The acronym LADAR (Laser Detection and Ranging) is often used in military contexts. The term laser radar is also in use but is misleading because it uses laser light and not the radiowaves that are the basis of conventional radar
In MEMS ladar, which is a “single-point” or scanning ladar, a collimated laser pulse hits a MEMS mirror tilted toward a point in the field of view (FOV) that represents an image pixel. After the pulse is reflected from the target, the portion reflected back to the ladar’s photodetector (PD) is then analyzed for time-of-flight and intensity.
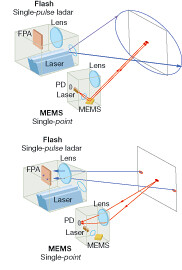
To yield the same energy at the target area, the pulse from a flash ladar’s laser would have to be at least 65,000 times more powerful than that from a MEMS ladar’s laser (assuming all other characteristics are the same) to produce a 256 x 256 pixel image (top). Furthermore, because the pulse reflected back from the target is being distributed over the entire FPA, the flash ladar’s laser would have to be an additional 65,000 times more powerful to yield the same pulse energy per pixel as the MEMS ladar (bottom)
Google techtalks on the 3d cameras of ASC

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.