

The robot — created after observing and creating computer simulations of the black ghost knifefish — could pave the way for nimble robots that could perform underwater recovery operations or long-term monitoring of coral reefs.
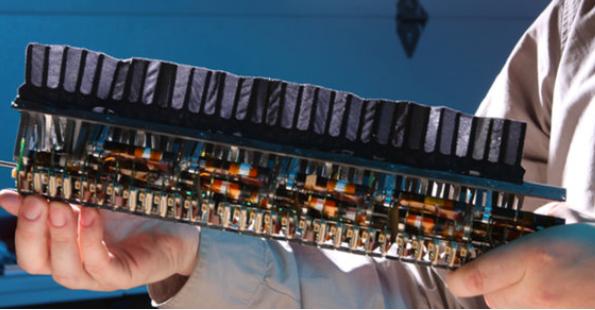
The group then hired Kinea Design, a design firm founded by Northwestern faculty that specializes in human interactive mechatronics, and worked closely with its co-founder, Michael Peshkin, professor of mechanical engineering, to design and build a robot. The company fashioned a forearm-length waterproof robot with 32 motors giving independent control of the 32 artificial fin rays of the lycra-covered artificial fin. (That means the robot has 32 degrees of freedom. In comparison, industrial robot arms typically have less than 10.) Seven months and $200,000 later, the GhostBot came to life.
The robot is also outfitted with an electrosensory system that works similar to the knifefish’s, and MacIver and his team hope to next improve the robot so it can autonomously use its sensory signals to detect an object and then use its mechanical system to position itself near the object.
Humans excel at creating high-speed, low-maneuverability technologies, like airplanes and cars, MacIver said. But studying animals provides a platform for creating low-speed, high-maneuverability technologies — technologies that don’t currently exist. Potential applications for such a robot include underwater recovery operations, such as plugging a leaking oil pipe, or long-term monitoring of oceanic environments, such as fragile coral reefs.
While the applied work on the robot moves ahead in the lab, the group is pursuing basic science questions as well. “The robot is a tool for uncovering the extremely complicated story of how to coordinate movement in animals,” MacIver said. “By simulating and then performing the motions of the fish, we’re getting insight into the mechanical basis of the remarkable agility of a very acrobatic, non-visual fish. The next step is to take the sensory work and unite the two.”
If you liked this article, please give it a quick review on ycombinator or StumbleUpon. Thanks
netseer_tag_id = “2397”;
netseer_ad_width = “750”;
netseer_ad_height = “80”;
netseer_task = “ad”;
Featured articles
Ocean Floor Gold and Copper
Ocean Floor Mining Company

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.