

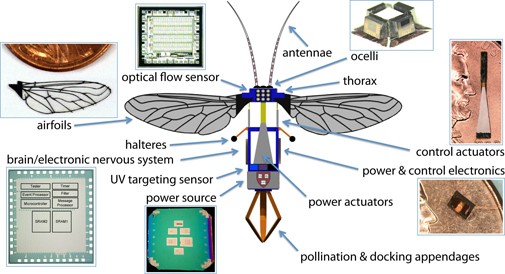
Harvard has a project to develop robotic bees
The aim is to push advances in miniature robotics and the design of compact high-energy power sources; spur innovations in ultra-low-power computing and electronic “smart” sensors; and refine coordination algorithms to manage multiple, independent machines. They want to make them robust and agile enough that they might one day perform sensitive and even dangerous tasks like military surveillance and weather mapping.
The group is working on several enabling technologies like ultra low power computing
* Flexible Voltage Stacking and Thread Motion
* DAC/ADC-based high-speed links
High-speed DAC, ADC, CDR, digital EQ, etc.
* On-chip regulators for fast DVFS
Regulator circuits, architecture support, and modeling
* SW+architecture to combat PVT noise (also see Alarms)
* Variation-tolerant on-chip memories
* Power electronics for microrobotics
* Collaborative timing recovery
Milligram-Scale High-Voltage Power Electronics for Piezoelectric Microrobots (2009)
This paper describes the design and implementation of milligram-scale high-voltage power electronics circuits suitable for driving piezoelectric actuators in a variety of compact applications, including autonomous microrobots. The electrical behavior of piezoelectric actuators is discussed and used to establish optimal drive requirements. Circuit topologies suitable for driving piezoelectric bimorphs, as well as dual-electrode actuators such as unimorphs and stacks, are presented. The experimental realizations of the circuits are described, including sub-100mg voltage converters and high-voltage drivers with step-up ratios of up to 60, power densities of over 1600W/kg, and the ability to generate arbitrary output signals and recover energy from the load. The applicability of the drive circuits to a flapping-wing robotic insect, such as the Harvard Microrobotic Fly, is verified by demonstrating successful wing flapping motion powered by one of the drive circuits.
If you liked this article, please give it a quick review on ycombinator or StumbleUpon. Thanks

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.