

IEEE Spectrum – Robot Uses Supersonic Jets of Air to Stick to Almost Anything
Bernoulli grippers are fine for picking up things, they’re not generally strong enough to enable a robot to support its own weight, much less climb. A research group from the University of Canterbury in New Zealand has developed a supersonic version of the Bernoulli gripper that’s five times stronger than the conventional version, which is enough to allow a robot to climb on a bunch of different surfaces. And when you’re watching this video, keep in mind that unlike pretty much every other climbing robot in existence, the grippers on this robot aren’t touching the wall.
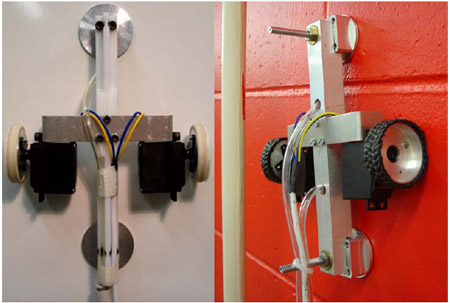
* MArch 3 airflow creates a low pressure vortex inside the gripper which provides the actual adhesion force, and in testing on the robot, this supersonic gripper is able to support five times as much weight as a conventional Bernoulli gripper, all without using any additional air volume or pressure.
* The robot could be used for industrial inspections. The supersonic non-contact grippers will be available in “some months” for “a few hundred dollars,” the researchers say.
If you liked this article, please give it a quick review on ycombinator or StumbleUpon. Thanks

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.