

DARPA’s Robotics Challenge will launch in October 2012. Teams are sought to compete in challenges involving staged disaster-response scenarios in which robots will have to successfully navigate a series of physical tasks corresponding to anticipated, real-world disaster-response requirements.
The primary goal of the DARPA Robotics Challenge program is to develop ground robotic capabilities to execute complex tasks in dangerous, degraded, human-engineered environments. The program will focus on robots that can utilize available human tools, ranging from hand tools to vehicles. The program aims to advance the key robotic technologies of supervised autonomy, mounted mobility, dismounted mobility, dexterity, strength, and platform endurance. Supervised autonomy will be developed to allow robot control by non-expert operators, to lower operator workload, and to allow effective operation despite low fidelity (low bandwidth, high latency, intermittent) communications.

42 page description of the 2 million dollar DARPA robotics challenge
Robotic Octocathalon
For Event 1 (drive a utility vehicle to the site) the robot must demonstrate mounted mobility by ingress to the vehicle, driving it on a road, and egress from the vehicle. The robot must also demonstrate manipulation by operating the controls, including steering, throttle, brakes, and ignition. The vehicle is expected to be an approximately 1000 lb. (453 kg) payload utility vehicle. The robot must steer, accelerate, and brake. The roadway will be a prepared surface such as asphalt, concrete, gravel, or dirt. The travel course will have moderate curvature, and not be straight. The maximum travel speed is expected to be approximately 15 km/hr (for safety). Ingress to and egress from the vehicle shall not require a fixture nor shall it require vehicle modifications. In earlier stages of the program the roadway will be clear of obstacles, and in later stages the roadway may include obstacles, both stationary and dynamic.
For Event 2 (travel dismounted across rubble) the robot must demonstrate dismounted mobility by crossing terrain ranging from smooth and level, to rough and sloped, with some loose soil and rocks. This terrain will be easily traversable by a human. In addition, the terrain will include discrete obstacles such as rocks, bushes, trees, and ditches that prevent easy passage by a person. The robot must avoid those obstacles that it cannot safely traverse.
For Event 3 (remove debris blocking an entryway) the robot must demonstrate the dexterity and strength to move an object blocking an entryway. The object will have size, weight, and other properties to be movable either by a person or by the GFE Platform. The object mass is expected not to exceed 5 kg. The object type has not yet been selected, but is expected to be solid like a rock or a cinder block, and may have an irregular shape.
For Event 4 (open a door and enter a building) the robot must demonstrate the dexterity to operate a door handle and the strength to push the door open. The door and door handle are expected to be standard, commercially available items.
For Event 5 (climb an industrial ladder and traverse an industrial walkway) the robot must demonstrate dismounted mobility to traverse an industrial elevated walkway. It is expected that the walkway (also known as a catwalk) will have a grated surface and handrails. The robot must also demonstrate dismounted mobility and manipulation to climb an industrial ladder. It is expected that a person would need to use both arms and legs to climb the ladder.
For Event 6 (use a tool to break through a concrete panel) the robot must demonstrate using a power tool to perform forceful manipulation. The power tool is expected to be an air or electric impact hammer and chisel, or an electric reciprocating saw (e.g. Sawzall). The task is expected to be breaking through a concrete panel or through a framed wall.
For Event 7 (locate and close valve near leaking pipe) the robot must demonstrate the perception ability to find a leaking pipe and a nearby valve, the dismounted mobility to approach the valve, and the manipulation ability to close the valve. It is expected that the facility will contain multiple pipes and valves, but only one leaking pipe, and only one valve near the leaking pipe. It is expected that the leak in the pipe will be visible as smoke and audible as the hiss of escaping gas. It is expected that a person would need to use two hands to close the valve. It is expected that there will be an obstacle-free path from the robot start location to the valve.
For Event 8 (replace cooling pump) the robot must demonstrate the perception ability to locate the pump, the manipulation ability to loosen one or more fasteners, and the bi-manual manipulation ability to extract the pump from its fittings and reverse all steps to replace the pump. It is expected that the pump will be small and compact enough that a human could handle it with a single hand, and that the pump assembly will include flanges that would serve as natural “handholds” for a human, and that the pump will have fasteners that eliminate the possibility of cross-threading.
DARPA will adjust the difficulty of the scenario as the program progresses, depending on capabilities demonstrated and practical considerations. DARPA will also intentionally vary details of the scenario to encourage generality and discourage tuning or optimization of parameters for a small range of conditions.
Program Funding
The program has planned the following funding for teams. This plan is subject to change depending on the number of qualified teams and available resources. (The symbol M represents millions, the symbol k represents thousands.)
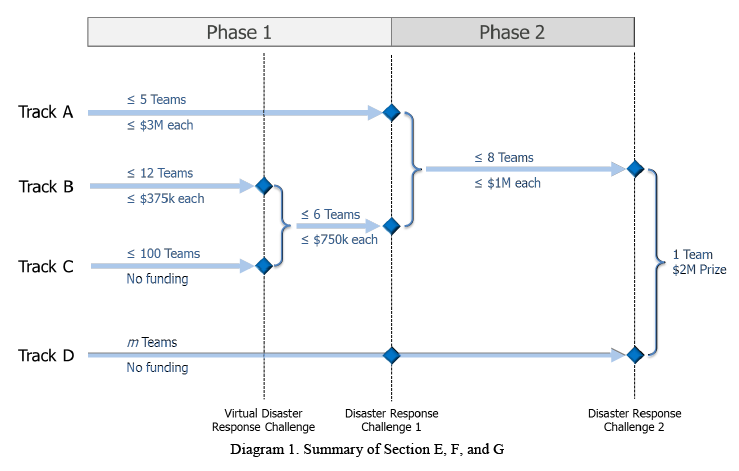
Phase 1
• Track A: Up to $3 Million for each team, with up to five (5) teams
• Track B first nine (9) months through the Virtual Disaster Response Challenge: Up to $375k for each team, with up to twelve (12) teams
• Track B/Track C last six (6) months after the Virtual Disaster Response Challenge: Up to $750k additional for each team, with up to six (6) teams
Phase 2
• Up to $1M for up to eight (8) of the top performing teams from the first physical disaster challenge
Prize
• Anticipated to be $2M to a single team
Foreign teams can compete but will not get the additional DARPA funding.
Robots played a supporting role in mitigating fallout from the Fukushima nuclear plant disaster in Japan, and are used by U.S. military forces as assistants for servicemembers in diffusing improvised explosive devices. True innovation in robotics technology could result in much more effective robots that could better intervene in high-risk situations and thus save human lives and help contain the impact of natural and man-made disasters.
The DARPA Robotics Challenge consists of both robotics hardware and software development tasks. It is DARPA’s position that achieving true innovation in robotics, and thus success in this challenge, will require contributions from communities beyond traditional robotics developers. The challenge is structured to increase the diversity of innovative solutions by encouraging participation from around the world including universities, small, medium and large businesses and even individuals and groups with ideas on how to advance the field of robotics.
“The work of the global robotics community brought us to this point—robots do save lives, do increase efficiencies and do lead us to consider new capabilities,” said Gill Pratt, DARPA program manager. “What we need to do now is move beyond the state of the art. This challenge is going to test supervised autonomy in perception and decision-making, mounted and dismounted mobility, dexterity, strength and endurance in an environment designed for human use but degraded due to a disaster. Adaptability is also essential because we don’t know where the next disaster will strike. The key to successfully completing this challenge requires adaptable robots with the ability to use available human tools, from hand tools to vehicles.
“Robots undoubtedly capture the imagination, but that alone does not justify an investment in robotics,” said DARPA Acting Director, Kaigham J. Gabriel. “For robots to be useful to DoD they need to offer gains in either physical protection or productivity. The most successful and useful robots would do both via natural interaction with humans in shared environments.”
If you liked this article, please give it a quick review on ycombinator or StumbleUpon. Thanks

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.