
Talk Polywell has a summary of the latest Mach Effect experiment and paper by James Woodward.
Full Paper – Recent Results of an Investigation of Mach Effect Thrusters (15 pages)
ABSTRACT – The theory underlying Mach effects – fluctuations of the restmasses of accelerating objects in which internal energy changes take place – and their use for propulsion is briefly recapitulated. Experimental apparatus based on a very sensitive thrust balance is briefly described. The experimental protocol employed to search for expected Mach effects is laid out, and the results of this experimental investigation are presented. A series of tests conducted to explore the origin of the thrust signals seen are described, and two of those tests – the most likely spurious sources of thrust signals – are considered in some detail. The thrust signals seen, if genuine Mach effects, suggest that “advanced and exotic” propulsion can be achieved with realistic resources.
Conclusion – We have seen that when the results of the Wilkinson Microwave Anisotropy Probe project are taken into consideration, together with the work of Dennis Sciama, Carl Brans, Keneth Nordtvedt, and others, it follows that inertial forces are gravitational in origin. Moreover, an inertial effect that results from the acceleration of bodies with changing internal energies produces fluctuations in the restmasses of the accelerating objects. Those fluctuating restmasses can be used to demonstrate the reality of these “Mach” effects, as described above. That demonstration involves only one of the two Mach effects predicted by theory. But if it is present, then the other effect must exist too. And if it exists, then in principle it should be possible to produce the gargantuan amount of exotic matter needed to make starships and stargates technically feasible. We therefore recommend that the exploration of Mach effects be pursued with resolve.

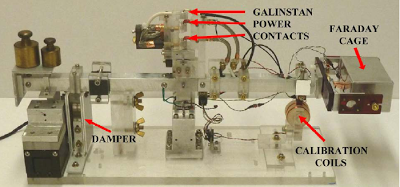
The thrust balance used in the experiment whose results are reported here. C-flex flexural bearings in the central column support the balance beam and provide the restoring torque for thrust measurements. The position of the beam is sensed with a Philtech optical position sensor whose probe is attached to the stepper motor to the left of the damper.
Experimental Protocols
When experiments with PZT stacks were first designed over a dozen years ago, two procedures were used in collecting data. Sweeps of chosen ranges of frequencies were done, chiefly to identify the presence and locations of resonant behaviors. Once found, the frequency of the applied signal(s) was adjusted to the resonant frequencies (one at a time) and sustained pulses of power with a half second to several seconds duration were administered. In addition to the applied voltage and thrust response, several other data channels were recorded – including the response of an accelerometer embedded in the PZT stack and the temperature measured with a thermistor embedded in the aluminum cap that clamps the stack to the brass reaction disk. The cycles of data were computer controlled so as to be identical to each other, simplifying the task of signal averaging with multiple cycles to suppress random noise in the data.
Data were acquired at a rate of 100 Hz per channel, and each channel was provided with a 50 Hz low pass anti- aliasing filter. In the present work, started a year and a half ago, data cycles of 20 seconds were initially used, and recently the interval was extended to 32 seconds. Instead of doing frequency sweeps and pulses separately, they were combined. Each cycle consisted of a few seconds of quiescent initial data, followed by a power pulse at the center frequency of the sweep to follow with a duration of a half second to several seconds, followed by the frequency sweep of a predetermined range, followed by another center frequency pulse like the initial one, followed by several seconds of quiescent data. Usually, but not always, the center frequencies for the sweeps were chosen to be resonant frequencies of the devices. Typically, between one and two dozen cycles of data taken under the same circumstances (durations and center frequencies, but not things like temperature) were needed for signal averaging that would reduce the noise in the thrust traces to a few tenths of a micronewton or less. After the resonance frequency of a particular PZT stack was established, runs were sometimes done without frequency sweeps. In one case, in the normally swept part of each cycle the device was simply turned off. In another case, the normally swept part of the cycle was replaced with constant center frequence power on, resulting in a power pulse of 10 seconds duration. Since the settling time of the balance beam was about 5 seconds, these 10 second power pulses allowed the demonstration of the stationary nature of the thrusts produced by the Mach effect in these devices.
The resonant frequencies for the PZT stacks were found to lie in the range of 35 to 40 KHz. Though it was not appreciated at the outset, the electrical and mechanical resonant frequencies in this range did not necessarily coincide, depending on detailed circumstances differing by as much as a kilohertz or two. When, by chance, they did coincide, unusually good behavior was obtained. One device, in which the two resonances coincided by chance for a while, produced thrusts on the order of 10 μN for several weeks, the amplitude of the voltage across the device at resonance being in the range of 350 to 400 volts. The “just so” conditions were eventually lost. But this and another device like it continued to produce thrusts up to a couple of μN, and those devices were used to carry out a series of tests to establish whether the thrust signals spurious, or evidence for a real Mach effect.
Those tests included checking to see whether the thrusts seen depended on the pressure of the residual air in the vacuum chamber by comparing data obtained with the chamber pressure less than 10 mT with data for a chamber pressure of 10 T. No significant difference was found. Mechanical thrust signals were generated using the calibration system so that mechanical signals, which are affected by the inertia of the balance beam, could be consistently discriminated from, for example, electrical signals. Another test involved replacing the device with a capacitor with roughly the same capacitance (41 nf versus 39 nf) as the devices and running to see what effect the currents and voltages present had on the thrust circuit. The simple answer is, none. Another test involved removing part of the Faraday cage and carrying out thrust tests with the device in various orientations to see if there was any electromagnetic coupling to insulators or conductors in the environment. None was detected.
One routine test and two potential spurious sources of signals deserve special mention. The routine test was reversal of the direction of the device on the balance beam; that is, “forward” and “reversed”. Essentially all data was acquired with roughly equal numbers of cycles of forward and reversed orientations. The reason for following this protocol is simple. When the difference of the forward and reversed averages is taken, all signals that do not reverse sign with the direction reversal are cancelled as common mode “noise”. For example, should a small torque be introduced by the currents and/or voltages present in the galinstan contacts or their leads, they will not change when the direction of the device is reversed. Consequently, they will be cancelled by this protocol. Likewise for all other non-reversing signals. And one can have confidence that any thrust that survives this protocol is produced in the device and/or its mount and Faraday cage, for they are the only things that change with direction reversal.
The two sources of potential spurious signals are thermal effects and “Dean drive” effects. Operation of the devices causes them to heat up. That in turn causes thermal expansion of the parts of the device and its mount. And the thermally driven motion of the parts of the device and mount, if they are changing in time, will produce thrusts that are communicated to the balance beam. In the case of Dean drive effects, vibration – and inevitable accompaniment to the operation of the devices – if it is communicated to a part of the balance where static and dynamic friction can act periodically to cause motion in one direction (but not the other), can produce behavior that looks like a thrust acting on the balance beam. This may take place, for example, with an object experiencing eccentric motion sitting on a rough surface, or located in a fluid with non-vanishing viscosity. In the case of this apparatus, the test that excludes residual air in the vacuum chamber eliminates the fluid variety of Dean drive effect. The only other place where such an effect might operate is in the bearings that support the balance beam in the central column. A careful investigation of both of these effects was carried out by one of us (JFW), and the results are reported in detail in the forthcoming book: Making Starships and Stargates: the Science of Traversable Absurdly Benign Wormholes. Here we report subsequent work that encompasses data that speaks to the issue of thermal effects in a different way than than previously reported.
If you liked this article, please give it a quick review on ycombinator or StumbleUpon. Thanks

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.