
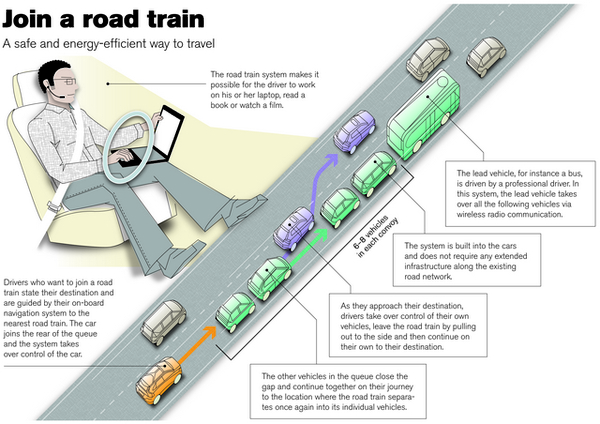
In February this year, aline-up of four large trucks circled an oval test track in Tsukuba City, Japan to help get so-called “truck platooning” technology ready for real-world use. This technology aims to create semi-autonomous road trains, where convoys of vehicles enter a snaking train of vehicles under the command of the lead vehicle. The drivers of the “drones” are then free to do whatever they like – read a book, take a nap or just sit. When they are ready to leave, the driver takes back control and exits the train. In theory the technology offers several benefits, such as cutting down on accidents and improving fuel efficiency.
The Japanese demonstration was the latest of a couple of projects set up to trial and develop the technology.
* A couple of years ago a project at RWTH Aachen University in Germany operated a platoon of four trucks spaced at 10m (33ft) intervals.
* In the US, research at the University of California, Berkeley put three-truck caravans on the road with spacing from 3 to 6 meters.
* last year, the Scania Transport Laboratory in Sweden tested aspects of truck platooning on a 520km (325 miles) shipping route between the cities of Sodertalje and Helsingborg.
* a recently completed European project led by Volvo called Safe Road Trains for the Environment (Sartre) has explored using cars and lorries simultaneously. Its platoons cruised at 85 km/h (50mph) with a gap between each vehicle of 6m. The study vehicles put in some 10,000 km (6,200 miles) of road, and – like the Japanese study – indicated that platooning could offer substantial benefits.
* The Japanese study was intended to address some of the challenges in making the technology ready for public use by ensuring bulletproof safety and reliability. The Japanese target is to enable both large and small trucks to safely maintain a 4 meters distance between vehicles in single file while driving 80km/h.

The Japanese used a suite of technologies including an automated steering system, automatic vehicle-following system and cooperative adaptive cruise control.
In the trials, the lead vehicle – driven by a specially trained driver – took control of the caravan and led it round and round the test track issuing commands on the fly. For example, the speed of the leader was communicated wirelessly every 20 milliseconds to allow the train to make constant adjustments and to ensure that they were driving at both an optimum and safe distance.
But the second, third, and fourth vehicles are not dumb either – they were also equipped with millimeter-wave radar and infrared laser radars to detect obstacles and recognize lane markings, as well as a series of algorithms and fail-safe controls to better manage the vehicles.
Although the set-up sounds complex, Iwai believes that it would be a relatively simple task to upgrade modern trucks, many of which are already fitted with most elements of the technology.
The trucks’ fuel economy improved by 15% or more on average, by allowing the vehicles to slip stream each other like drafting Tour de France riders. It also showed that the lead truck can benefit from less drag at its rear as the ‘bow-wave’ of the tailing vehicle in-effect “pushes” the lead truck forward.
Engineers and planners working on the technology believe none of these issues are insurmountable and that road trains could be cruising highways sometime in the next decade. NBF believes it will happen sooner on dedicated commercial roads (such as roads that just have trucks for delivering coal to a coal plant.)
Self Driving Cars
Representatives from Google, Toyota and Texas Instruments were on Capitol Hill to review the development of self-driving vehicles — which are poised to enter the transportation world if federal regulations will allow.
After testing a series of successful prototypes, Chris Urmson, an engineer for Google’s Self-Driving Car Program says the technology for a fully autonomous, self-driving car is “more like five years away.”
the benefits of developing “intelligent transportation systems” such as the driverless car include reduced fuel consumption, increased safety and increased mobility for individuals incapable of conventional driving.
Google’s self-driving cars are able to sense their surroundings, pedestrians and even stoplights. “But unlike a person, they can see 360 degrees around,” Urmson said. These vehicles have completed more than 400,000 miles of autonomous driving to date.
He said the cars are also able to better utilize road space. With a road full of driverless vehicles, cars can safely drive closer together — using less space and reducing traffic and travel times.
The cost of the equipment in the latest version of Google’s driverless car is at least $150,000.
Oxford University’s Mobile Robotics Group (MRG) RobotCar is a modified Nissan LEAF. Their components are off the shelf and cost 7700 dollars. The electronics will rapidly fall in price and the Oxford researchers think that volume production could bring the costs down to $155 per car.
Nextbigfuture has previously summarized an IEEE study of highway capacity and robotic cars..
An IEEE paper assessed the increase in highway capacity.
The increase in highway capacity when using sensors alone is about 43%.
The increase in highway capacity when using both sensors and vehicle to vehicle communication is about 273%.
Current maximum throughput is 2200 vehicles per hour per lane of highway.
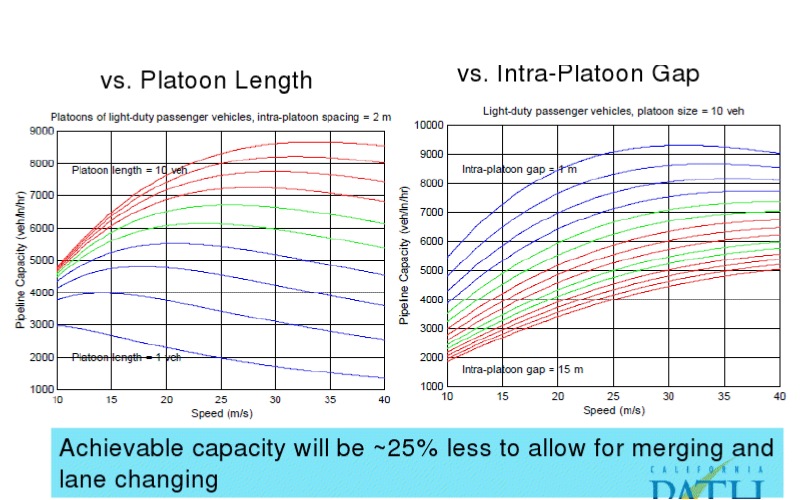
Highway capacity increases was also analyzed by the California PATH program. Automation will allow shorter vehicle gaps and narrower spacing from more precise turning.
Platooning cars could get to 400% increase in highway capacity with 25% margin for merging. Longer platoons with smaller gaps enable higher capacity. The most capacity is not always needed and under most circumstances larger gaps and shorter platooning can be used. Platooning also allows the following cars to draft behind the lead vehicle in order to save on fuel.

If you liked this article, please give it a quick review on ycombinator or StumbleUpon. Thanks

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.