

The Atlas robot pictured below is an example of one of many innovative prototypes of disaster-response robots scheduled to compete in the DARPA Robotics Challenge (DRC) Trials that are taking place December 20-21 at the Homestead-Miami Speedway in Homestead, Fla.
While a number of the teams’ robot designs embody different approaches, the designs also incorporate many of the same advanced technologies. Technologies include those that help the robots perceive, move through and perform tasks in simulated disaster environments, all with a human operator in the loop. The technologies also enable the robots’ operators to see what the robots see and direct the robots in real time. Through the DRC, DARPA aims to advance robots’ capabilities to help human responders in future emergencies.
DARPA designed the tasks to simulate what a future robot might have to do to safely enter and effectively work inside a disaster zone. They will test the robots’ autonomous perception, autonomous decision-making, mounted and dismounted mobility, dexterity and strength. Each team will receive a score based on its performance, with all eight tasks carrying equal weight. Up to eight teams with the highest scores may continue to receive DARPA funding to prepare for the DRC Finals scheduled for late 2014.


Each task presents distinct challenges for the robots and their operators:
Drive and Exit Utility Vehicle: The hardest single task and the one that requires the most robot-human interaction. The operators must direct the robots to drive the vehicle safely despite occasional communications disruptions. Getting out of the driver’s seat poses significant strength and dexterity challenges for the robots.
Walk Across Rough Terrain: The robots must maintain their balance and identify safe routes for placement of limbs.
Remove Debris from Doorway: Robots must demonstrate a wide range of motion, in addition to balance and strength, to clear a path forward.
Open Series of Doors: Moving the doors in an arc challenges the robots’ perception and dexterity. The robots must figure out how to align and move themselves as they open each door.
Climb Industrial Ladder: To avoid falls, the robots must safely navigate the ladder and maintain their balance as they climb. Strength is required to stop a fall.
Cut Through Wall: Using power tools tests the robots’ strength, dexterity and ability to perceive their environment. The robots must also simultaneously apply rigid force to hold a tool, yet demonstrate the flexibility to smoothly manipulate it.
Carry and Connect Fire Hose: The robots must identify the standpipe and then transport a bulky, non-rigid item (the fire hose) to it. The robots must then have sufficient dexterity and strength to attach the hose to a standpipe and open the spigot.
Locate and Close Leaking Valves: The robots must identify the valves, determine which ones are open and have sufficient range of motion to turn the valve wheels in an arc to close them.
Because the robots are still so early in their development, DARPA is providing the robots with 30 minutes to perform each task. Each team will attempt to complete each task once over the course of the two-day event. It is expected, however, that not all of the teams will finish every task.
“We know the robots are slow and unsteady at this point—they’re much like a one-year-old human in terms of locomotion and grasping abilities and much farther behind that in brainpower,” said Gill Pratt, DARPA program manager. “The robots are taking ‘baby steps’ this year, but their performance will establish a reference point for what we can expect from the teams that return next year for the DRC Finals. We want that event to be much more difficult and force the robots to demonstrate useful capabilities in realistic disaster scenarios.”
Track A: Selected through proposal review to receive DARPA funding to develop hardware and software systems

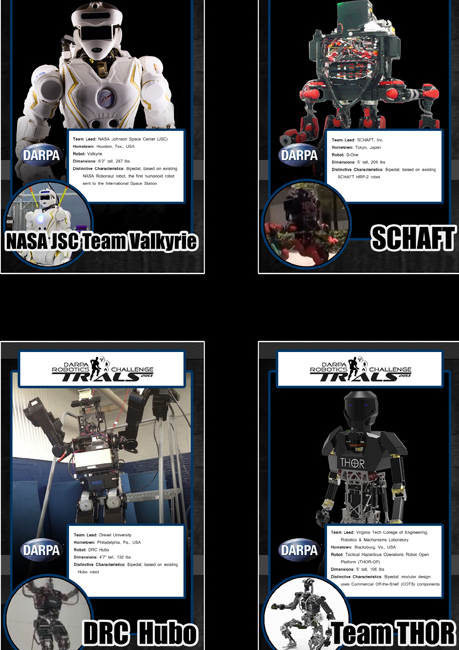
Track B: Selected through proposal review to receive DARPA funding to develop software; competed in the June 2013 Virtual Robotics Challenge to use a government-furnished Atlas robot in the DRC Trials
Track C: Initially not funded by DARPA, teams developed only software with no DARPA funding; competed in the June 2013 Virtual Robotics Challenge to receive DARPA funding and use a government-furnished Atlas robot for use in the DRC Trials
Track D: Teams that developed hardware and software systems with no DARPA funding

If you liked this article, please give it a quick review on ycombinator or StumbleUpon. Thanks

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.