
A team of engineers has developed a class of tiny bio-hybrid machines that swim like sperm, the first synthetic structures that can traverse the viscous fluids of biological environments on their own. The bio-bots are modeled after single-celled creatures with long tails called flagella – for example, sperm. The researchers begin by creating the body of the bio-bot from a flexible polymer. Then they culture heart cells near the junction of the head and the tail. The cells self-align and synchronize to beat together, sending a wave down the tail that propels the bio-bot forward.
This self-organization is a remarkable emergent phenomenon, Saif said, and how the cells communicate with each other on the flexible polymer tail is yet to be fully understood. But the cells must beat together, in the right direction, for the tail to move.
The team also built two-tailed bots, which they found can swim even faster. Multiple tails also opens up the possibility of navigation. The researchers envision future bots that could sense chemicals or light and navigate toward a target for medical or environmental applications.
“The long-term vision is simple,” said Saif, who is also part of the Beckman Institute for Advanced Science and Technology at the U. of I. “Could we make elementary structures and seed them with stem cells that would differentiate into smart structures to deliver drugs, perform minimally invasive surgery or target cancer?”
Nature Communications – A self-propelled biohybrid swimmer at low Reynolds number

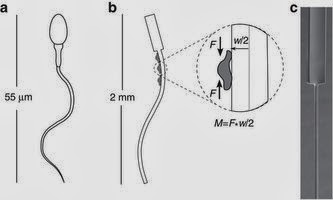
Concept design of a biohybrid flagellum.
Many microorganisms, including spermatozoa and forms of bacteria, oscillate or twist a hair-like flagella to swim. At this small scale, where locomotion is challenged by large viscous drag, organisms must generate time-irreversible deformations of their flagella to produce thrust. To date, there is no demonstration of a self propelled, synthetic flagellar swimmer operating at low Reynolds number. Here we report a microscale, biohybrid swimmer enabled by a unique fabrication process and a supporting slender-body hydrodynamics model. The swimmer consists of a polydimethylsiloxane filament with a short, rigid head and a long, slender tail on which cardiomyocytes are selectively cultured. The cardiomyocytes contract and deform the filament to propel the swimmer at 5–10 μm s−1, consistent with model predictions. We then demonstrate a two-tailed swimmer swimming at 81 μm s−1. This small-scale, elementary biohybrid swimmer can serve as a platform for more complex biological machines.
If you liked this article, please give it a quick review on ycombinator or StumbleUpon. Thanks

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.