

Truck platoons are the most imminently anticipated application of highly automated driving in commercial vehicles. A fusion of forward-looking radar and V2V communication enable fleets of trucks to safely maneuver with a short distance between vehicles. The reduction in aerodynamic drag for following vehicles, and buildup of pressure behind the lead vehicle yields impressive fuel efficiencies, with various tests reporting convoy savings of between 5% and 10%. “With most fleet operators attributing some 30 to 40% of their operating costs to fuel expenditure, the savings presented by platooning are significant,” comments James Hodgson, Research Analyst, ABI Research.
As technology progresses and regulations adapt to accommodate greater vehicle automation, further benefits to fleet operators will come in the shape of labor productivity gains and better asset utilization. Currently, solutions from pioneers such as Peloton Technology require active intervention from the following driver to keep the vehicle within the lane of travel, but in the future the driver of the lead vehicle could be in sole control of all vehicles in the convoy; allowing following drivers to rest, or eliminating the need for them altogether.
“The emerging market for platooning is promising; in no small part due to its relevance across a considerable spectrum of vehicle automation. The premise stretches all the way from a platoon comprised of two vehicles whose drivers seek to narrow the interval between them in a safe manner, through to scenarios which involve more vehicles than they do drivers,” Hodgson explains.
Recent high-profile investments in platooning technology have been made by the likes of Denso International America, Volvo Group Venture Capital, Magna International, Intel Capital, and the UPS Strategic Enterprise Fund, among others.

The most ambitious fully automated driving activity appears to be occurring in Japan’s Energy ITS project, which has been developing and testing a platoon of three fully automated trucks for close to 5 years. This project, under the sponsorship of METI through its New Energy Technology Development Organization (NEDO), has been funded at the equivalent of about $12 million per year for 5 years. The work is being conducted by researchers at multiple universities, with coordination and management by the Japan Automobile Research Institute (JARI) but with little direct involvement by the truck manufacturers. The primary goal is to attain energy savings (CO2 reductions) through the reduction of aerodynamic drag by operating trucks in an electronically coupled platoon at shorter-than-normal gaps, with additional objectives of improving highway traffic flow and safety. Because of Japan’s rapidly aging population, its truck fleet operators are concerned about future shortages of truck drivers, which could be alleviated if the following trucks in the platoon could indeed be driverless.
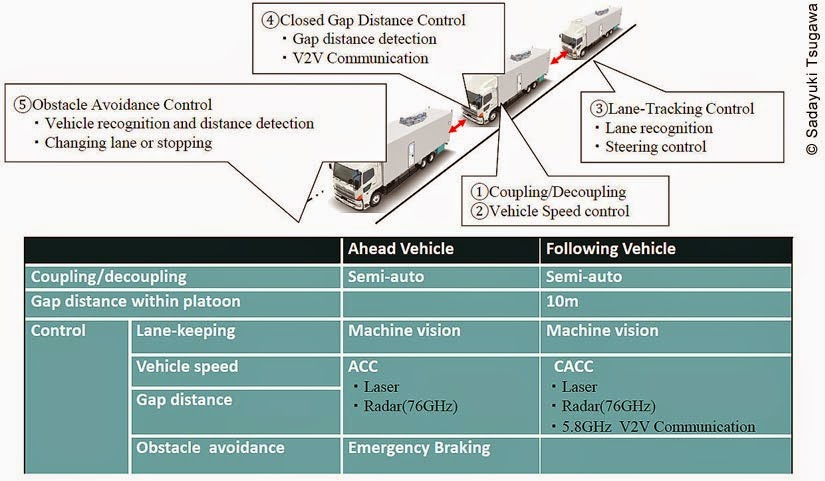
Presentation slide. Energy ITS truck platoon definition of capabilities. NOTE: V2V = vehicle-to-vehicle communication, ACC = adaptive cruise control, CACC = cooperative adaptive cruise control.
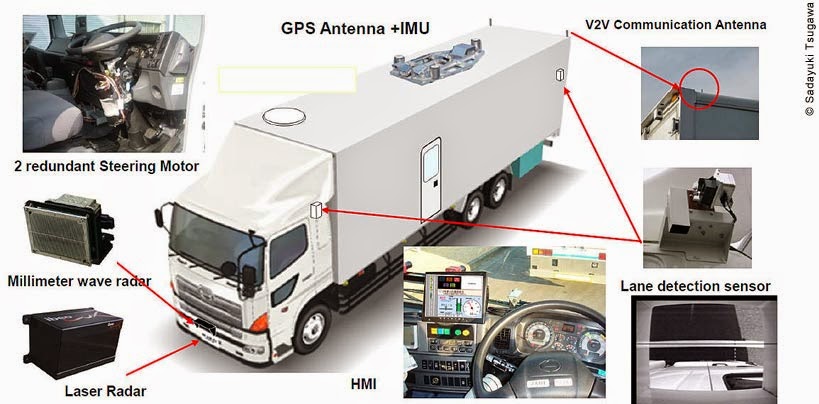
Automation equipment installed on Energy ITS trucks. NOTE: GPS = global positioning system, IMU = inertial measurement unit, V2V = vehicle-to-vehicle communication, HMI = human–machine interface
Toyota Motor Company has developed and tested a platoon of three Lexus LS-460 passenger cars that follow each other closely to reduce fuel consumption. Toyota has described this work in a few conference papers but has not provided any demonstrations of the system to visitors. This system uses frequent V2V communication to coordinate longitudinal motions of the vehicles and includes both forward– and rear–facing millimeter–wave radars on each vehicle to provide redundant information about the range and range rate between successive vehicles. Toyota reported string stability of vehicle-following control, with 10-m (33-ft) gaps and spacing errors of 1 m (3.3 ft) or less, including decelerations up to 0.4 g (4 m/s2 or 12.9 ft/s2). These vehicles did not include automation of lateral control.
Published results show impressive fuel savings from this system, which was optimized for fuel economy. The aerodynamic drag reductions were reported in the 40 percent range for the following vehicles and in the 8–9 percent range for the leading vehicle at a 10-m (33-ft) gap. Even at a 20-m (66-ft) gap they were still reporting 25 percent drag reductions for the following vehicles. The second vehicle saved somewhat more than did the third vehicle when direct fuel consumption measurements were recorded, in the 8–10 percent range (compared with 1–2 percent for the leading vehicle) at 10-m (33-ft) gaps, with gradual declines in savings as the gaps were increased in 5-m (16-ft) increments to 30 m (98 ft).
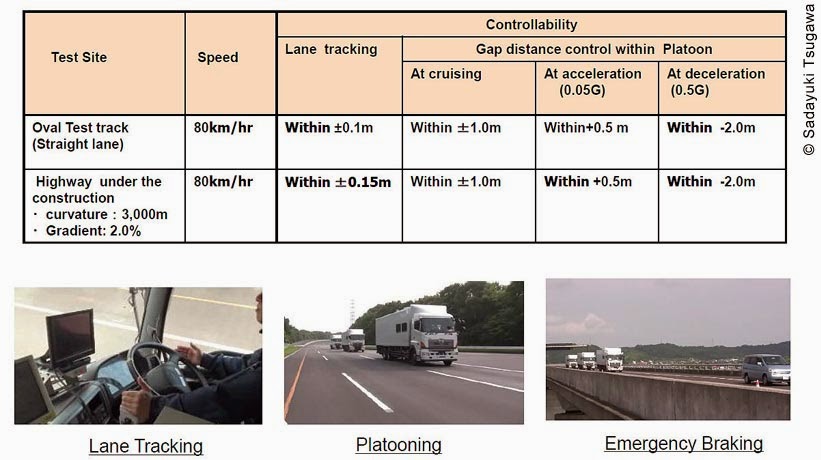
Presentation slide. Performance requirements for Energy ITS truck platoon system.
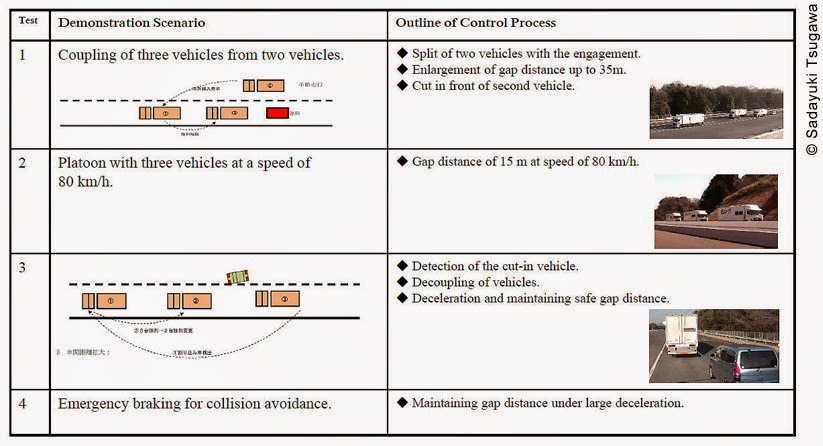
Maneuver scenarios for Energy ITS project truck platoon. NOTE: 80 km/h = 50 mi/h.
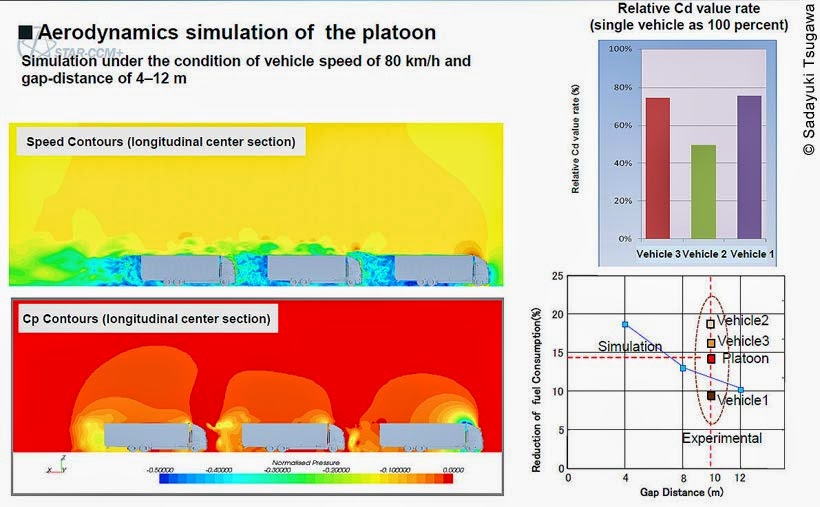
First predictions of aerodynamic drag effects of Energy ITS project truck platooning, compared with experimental results on full–scale trucks. NOTE: 80 km/h = 50 mi/h, 4 m–12 m = 13 ft–40 ft, Cd = drag coefficient, Cp = pressure coefficient.

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.