

Researchers in the Cockrell School of Engineering at The University of Texas at Austin have developed a centimeter-accurate GPS-based positioning system that could revolutionize geolocation on virtual reality headsets, cellphones and other technologies, making global positioning and orientation far more precise than what is currently available on a mobile device.
The researchers’ new system could allow unmanned aerial vehicles to deliver packages to a specific spot on a consumer’s back porch, enable collision avoidance technologies on cars and allow virtual reality (VR) headsets to be used outdoors. The researchers’ new centimeter-accurate GPS coupled with a smartphone camera could be used to quickly build a globally referenced 3-D map of one’s surroundings that would greatly expand the radius of a VR game. Currently, VR does not use GPS, which limits its use to indoors and usually a two- to three-foot radius.
The smartphone antenna’s poor multipath suppression and irregular gain pattern result in large time-correlated phase errors that significantly increase the time to integer ambiguity resolution as compared to even a low-quality stand-alone patch antenna. The time to integer resolution — and to a centimeter-accurate fix — is significantly reduced when more GNSS signals are tracked or when the smartphone experiences gentle wavelength-scale random motion.
GNSS chipsets are now ubiquitous in smartphones and tablets. Yet the underlying positioning accuracy of these consumer-grade GNSS receivers has stagnated over the past decade. The latest clock, orbit, and atmospheric models have improved ranging accuracy to a meter or so, leaving receiver-dependent multipath and front-end-noise-induced variations as the dominant sources of error in current consumer devices. Under good multipath conditions, 2-to-3-meter-accurate positioning is typical; under adverse multipath, accuracy degrades to 10 meters or worse.
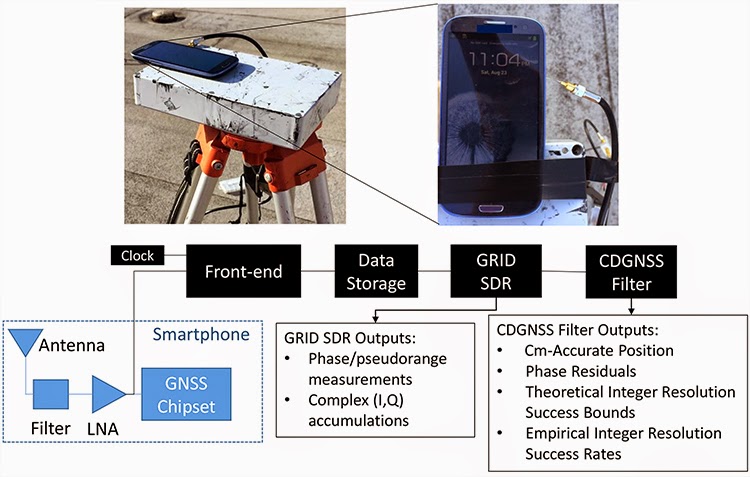
Test architecture designed for an in-situ study of a smartphone-grade GNSS antenna. The analog GNSS signal is tapped off after the phone’s internal bandpass filter and low-noise amplifier and is directed to a dedicated RF front-end for downconversion and digitization. Data are stored to file for subsequent post-processing by a software GNSS receiver and CDGNSS filter.
Centimeter Positioning with a Smartphone-Quality GNSS Antenna (10 pages)
“Imagine games where, rather than sit in front of a monitor and play, you are in your backyard actually running around with other players,” said Todd Humphreys, assistant professor in the Department of Aerospace Engineering and Engineering Mechanics and lead researcher. “To be able to do this type of outdoor, multiplayer virtual reality game, you need highly accurate position and orientation that is tied to a global reference frame.”
Humphreys and his team in the Radionavigation Lab have built a low-cost system that reduces location errors from the size of a large car to the size of a nickel — a more than 100 times increase in accuracy. Humphreys collaborated with Professor Robert W. Heath from the Department of Electrical and Computer Engineering and graduate students on the new technology, which they describe in a recent issue of GPS World.
Centimeter-accurate positioning systems are already used in geology, surveying and mapping, but the survey-grade antennas these systems employ are too large and costly for use in mobile devices. The breakthrough by Humphreys and his team is a powerful and sensitive software-defined GPS receiver that can extract centimeter accuracies from the inexpensive antennas found in mobile devices — such precise measurements were not previously possible. The researchers anticipate that their software’s ability to leverage low-cost antennas will reduce the overall cost of centimeter accuracy, making it economically feasible for mobile devices.
Humphreys and his team have spent six years building a specialized receiver, called GRID, to extract so-called carrier phase measurements from low-cost antennas. GRID currently operates outside the phone, but it will eventually run on the phone’s internal processor.
To further develop this technology, Humphreys and his students recently co-founded a startup, called Radiosense. Humphreys and his team are working with Samsung to develop a snap-on accessory that will tell smartphones, tablets and virtual reality headsets their precise position and orientation.
The researchers designed their system to deliver precise position and orientation information — how one’s head rotates or tilts — to less than one degree of measurement accuracy. This level of accuracy could enhance VR environments that are based on real-world settings, as well as improve other applications, including visualization and 3-D mapping.
Additionally, the researchers believe their technology could make a significant difference in people’s daily lives, including transportation, where centimeter-accurate GPS could lead to better vehicle-to-vehicle communication technology.
“If your car knows in real time the precise position and velocity of an approaching car that is blocked from view by other traffic, your car can plan ahead to avoid a collision,” Humphreys said.
Yet outside the mainstream of consumer GNSS receivers, centimeter — even millimeter — accurate GNSS receivers can be found. These high-precision receivers are used routinely in geodesy, agriculture, and surveying. Their exquisite accuracy results from replacing standard code-phase positioning techniques with carrier phase differential GNSS (CDGNSS) techniques. Currently, the primary impediment to performing CDGNSS positioning on smartphones lies not in the commodity GNSS chipset, which actually outperforms survey-grade chipsets in some respects, but in the antenna, whose chief failing is its poor multipath suppression. Multipath, caused by direct signals reflecting off the ground and nearby objects, induces centimeter-level phase measurement errors, which, for static receivers, have decorrelation times of hundreds of seconds. The large size and strong time correlation of these errors significantly increases the initialization period — the so-called time-to-ambiguity-resolution (TAR) — of GNSS receivers employing CDGNSS to obtain centimeter-level positioning accuracy.
Prior work on centimeter-accurate positioning with low-cost mobile devices has focused on external devices, or “pucks,” which contain a GNSS antenna and chipset. These devices interface with the smartphone via Bluetooth or a wired connection. Such solutions, which enjoy the better sensitivity and multipath suppression offered by their comparatively large, high-quality GNSS antennas, do not provide insight into the feasibility of CDGNSS on a stand-alone smartphone platform.
Conclusions and Future Work
Centimeter-accurate positioning was demonstrated based on data sampled from a smartphone-quality GNSS antenna. An empirical analysis revealed that the extremely poor multipath suppression of these antennas is the primary impediment to fast resolution of the integer ambiguities that arise in the carrier phase differential processing used to obtain centimeter accuracy. It was shown that, for low-quality smartphone-grade GNSS antennas, wavelength-scale random antenna motion substantially reduces the ambiguity resolution time.
Future work will study the effectiveness of combining antenna motion with a motion trajectory estimate derived from non-GNSS smartphone sensors to further reduce the integer ambiguity resolution time. This technique, which is a type of synthetic aperture processing applied to the double-differenced GNSS phase measurements, effectively points antenna gain enhancements in the direction of the overhead GNSS satellites, thereby suppressing multipath arriving from other directions. Preliminary results show that this technique offers modest benefit beyond the unaided random motion technique discussed herein.

SOURCES – Eurekalert, GPS World, research paper -Centimeter Positioning with a Smartphone-Quality GNSS Antenna

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.