

NASA Innovative Advanced Concepts study for a rover architecture for Europa and other planetary environments where soft robotics enables scientific investigation or human-precursor missions that cannot be accomplished with solar or nuclear power. This rover resembles a squid, with tentacle-like structures that serve both as electrodynamic tethers to harvest power from locally changing magnetic fields and as a means of bio-inspired propulsion. The electrical energy scavenged from the environment powers all rover subsystems, including one that electrolyzes H20. Electrolysis produces a mixture of H2 and O2 gas, which is stored internally in the body and limbs of this rover. Igniting this gas expands these internal chambers, causing shape change to propel the rover through fluid or perhaps along the surface of a planetary body. The Phase I effort constitutes advancement of this revolutionary rover concept from TRL 1 to TRL 2. The work will be conducted at Cornell University, led by PI Mason Peck and Co-I Robert Shepherd.
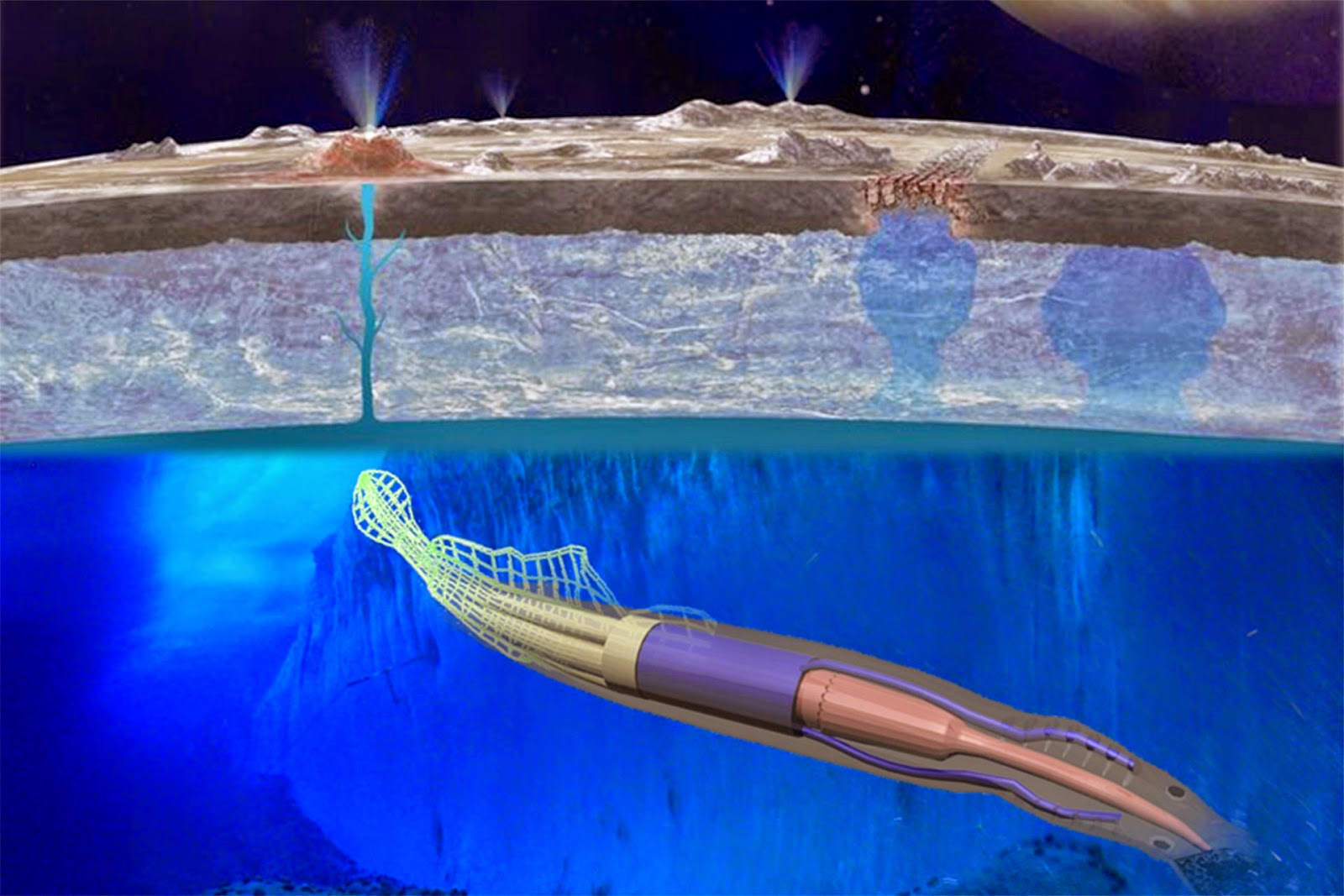
An artist’s rendering of Mason Peck’s soft-robotic rover, or ‘roboeel’, designed to enable amphibious exploration of gas-giant moons like Europa. It resembles a squid, with tentacle-like structures that serve as electrodynamic ‘power scavengers’ to harvest power from locally changing magnetic fields.NASA/Cornell University/NSF
Jupiter receives 25 percent less sunlight than Earth, putting traditional solar panel designs at a severe disadvantage. In 2013, Nasa also decided to cancel its Advanced Stirling Radioisotope Generator (ASRG) project, which would have delivered plutonium-based power systems for missions to Sun-poor environs including polar regions and liquid landscapes, like the lake on Saturn’s moon Titan.
“Roboeel” is designed to get around the issue by using magnetic fields, and not the Sun, as its power source. The underwater rover would use its “tentacle-like” appendages as electrodynamic tethers to capture energy from shifting magnetic fields on Europa.
If the concept eventually succeeds, it will enable amphibious exploration of gas-giant moons, notably Europa. It likely is relevant to other moons of Jupiter and Saturn with liquid lakes or oceans. Juno’s success notwithstanding, solar power near Jupiter is very limited.
The bio-inspired technologies we propose to consider bypass the need to power rovers with limited-lifetime batteries, large solar arrays, or nuclear power. In this one respect, it is a breakthrough concept. Beyond addressing issues of power, this rover concept also bypasses the difficulties of typical mechanisms in fluid through uniquely suited soft robotics. The expanding-gas locomotion concept is both exotic and eminently realizable, grounded in experimental work by our team.
The rover architecture we propose to create uses EDTs to electrolyze water into H2 and O2 because it is an efficient way to use resources from an environment where solar power and nuclear power may be unusable. In order to establish specific relevance to NASA science, we propose to build a swimming robot for use in the oceans of Europa. This rover will harvest energy from EDTs in the form of electricity and use it to power soft robots pneumatically and via combustion. Optionally, the skin of the robot will be a stretchable, electroluminescent display for illuminating the local marine environment, to enable underwater imaging. This suite of bio-inspired technology represents a tremendous leap forward in what we understand a rover to be.
This study also is expected to offer NASA a return on its investment in the nearer term. This work will assess the possibility that any life on Europa may be powered by electromagnetic energy, with singular implications for astrobiology. That scientific benefit may influence future directions in Europa exploration. More broadly, this study will serve as a pathfinder that introduces soft robotics into future rover trades.
The Fictional Matrix Sentinal Swarm Robots were robosquids



SOURCE – NASA NIAC, Wired

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.