

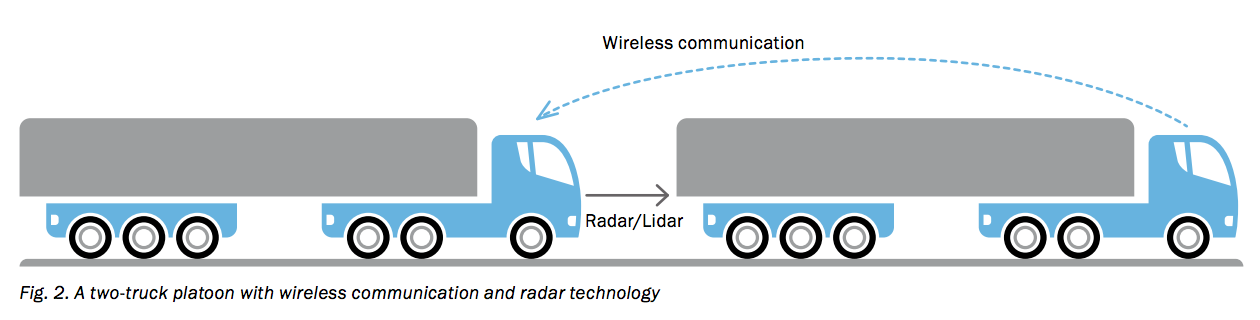
A platoon of two trucks is like a short train driving on the road, with the trucks driving very closely
behind each other. The distance between the two trucks can really be extremely small – creating a desirable form of tailgating. The distance can be as low as 0.3 seconds, which at 80 km/h is about 6.7 metres distance between the vehicles. Driving so close together is made possible by advanced Automated Driving technology, in conjunction with wireless vehicle-tovehicle (V2V) communication that makes it possible that the vehicles communicate with each other.
Once platooning is activated, a Following Vehicle in the platoon trails the Leading Vehicle. The Following Vehicle now follows the Leading Vehicle automatically, without interference of its driver. Because the vehicles are able to communicate with each another, they can adjust their speed and position without the typically delayed response time of a human driver. The vehicles communicate both ways, so also the Leading Vehicle can adjust its speed or position based on the response of the Following Vehicle. And since the vehicles are wirelessly coupled, it is possible to easily hop-on and hop-off from the platoon on-the-fly. There is no need to stop driving; connecting to a platoon or disconnecting can happen while driving by a push of a button.
Truck platooning has great potential for reducing transport costs, by lowering fuel consumption due to improved aerodynamics from reduced air resistance, eliminating the need for an attentive driver in the second vehicle, and better usage of truck assets, by optimisation of driving times and minimisation of idle time. On the societal level, driving safety increases as typically 90% of all accidents are human-induced, and platooning technology prevents human errors, leading to less accidents and damages. Greenhouse gas and air-quality related emissions decrease, and congestion and traffic jams are reduced.
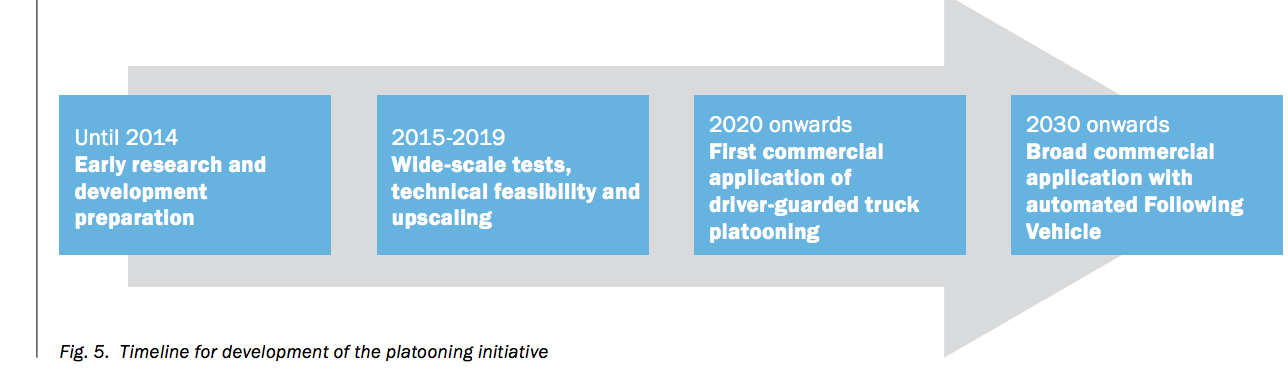
A phased implementation is crucial for widespread acceptance of platooning technology in the society at large, and especially of other road users. We expect that large-scale deployment in the commercial transportation industry is possible within approximately a five year period (see Fig. 5), so that in 2020, a form of truck platooning (e.g., SAE levels 2 or 3) is legally permitted and commercially available. More extensive applications of platooning (e.g., SAE level 4 or 5) are not expected before 2030. Of course, there is a fair amount of guesswork in this timeline, as timing is very much dependent on political support, innovation funding, technological advancement and public acceptance. This timeline is elaborated in Section 6.2, in which we propose to commission a five-year Dutch open innovation programme towards the goal of commercial platooning in 2020.
In terms of development process, we might compare truck platooning with the growth trajectory of the LZV developments in the Netherlands. Initial small-scale experimentation started in 2000, the first wide-scale tests initiated in 2006. Final developments were wrapped up in 2012 when the LZV was officially allowed on Dutch main roads, so about 6 years later. Leveraging the encouraging experience of the LZV, we expect that developments will be along the lines of the LZV, such that platooning trucks are officially allowed on Dutch main roads in about five years’ time. Required changes to European legislation and alignment in Dutch legislation with regard to driving/resting times (EC 561/2006) and the digital tachograph (EEC 3821/85) legislation will be among the greatest threats to this timeline, as well as the technological difficulty associated with ensuring robust control over the platoon under all circumstances.


Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.