

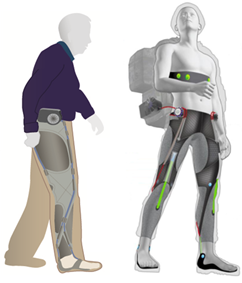
Harvard Biodesign Lab is developing next generation soft wearable robots that use innovative textiles to provide a more conformal, unobtrusive and compliant means to interface to the human body. These robots will augment the capabilities of healthy individuals (e.g. improved walking efficiency) in addition to assisting those with muscle weakness or patients who suffer from physical or neurological disorders. As compared to a traditional exoskeleton, these systems have several advantages: the wearer’s joints are unconstrained by external rigid structures, and the worn part of the suit is extremely light. These properties minimize the suit’s unintentional interference with the body’s natural biomechanics and allow for more synergistic interaction with the wearer.
They believe they can create passive and active systems that offload the high forces in the muscles and tendons in the leg – thus reducing the risk of injury and increasing the walking efficiency of the wearer. Another translational focus of our group is on gait assistance for medical applications. We foresee soft exosuits being able to restore mobility on patients with muscle weakness (e.g. elderly) or who suffer from a neurological disease such as a Stroke. Beyond our active systems, we envision translational potential in the area of sports and recreation where fully passive soft suits with structured functional textiles can provide small amounts of assistance during walking, hiking, running and other activities.
They are also developing exosuits that can assist soldiers walking while carrying heavy loads.
Structured functional textiles
They are creating innovative textiles that are inspired by an understanding of human biomechanics and anatomy. These wearable garments provide means to transmit assistive torques to a wearer’s joints without the use of rigid external structures. In order to obtain high-performance soft exosuits, some considerations should be taken into account in the design process. Exosuits should attach to the body securely and comfortably, and transmit forces over the body through beneficial paths such that biologically-appropriate moments are created at the joints. In addition, these garments can be designed to passively (with no active power) generate assistive forces due to the natural movement of the wear for particular tasks. A key feature of exosuits is that if the actuated segments are extended, the suit length can increase so that the entire suit is slack, at which point wearing an exosuit feels like wearing a pair of pants and does not restrict the wearer whatsoever.

Lightweight and efficient actuation
In order to provide active assistance through the soft interface, we are developing a number of actuation platforms that can apply controlled forces to the wearer by attaching at anchoring points in the wearable garment. We are developing lightweight and fully portable systems and a key feature of our approach is that we minimize the distal mass that is attached to the wearer through more proximally mounted actuation systems and flexible transmissions that transmit power to the joints. While most of our recent work is on cable-driven electromechanical approaches, we have also pursued pneumatic based approaches.

Wearable Sensors
New sensor systems that are easy to integrate with textiles and soft components are required in order to properly control and evaluate soft exosuits. Rigid exoskeletons usually include sensors such as encoders or potentiometers in robotic joints that accurately track joint angles, but these technologies are not compatible with soft structures. Our approach is to design new sensors to measure human kinematics and suit-human interaction forces that are robust, compliant, cost effective, and offer easy integration into wearable garments. In addition, we use other off the shelf sensor technologies (e.g. gyro, pressure sensor, IMU) that can be used to detect key events in the gait cycle. These wearable sensors can be used as part of the control strategy for the wearable robot or alternatively to monitor and record the movement of the wearer (when wearing the exosuit or as a standalone sensor suit) for tracking changes over time or determining what activities they are performing (e.g. walking vs running).

Abstract
We present the design and evaluation of a multi-articular soft exosuit that is portable, fully autonomous, and provides assistive torques to the wearer at the ankle and hip during walking. Traditional rigid exoskeletons can be challenging to perfectly align with a wearer’s biological joints and can have large inertias, which can lead to the wearer altering their natural motion patterns. Exosuits, in comparison, use textiles to create tensile forces over the body in parallel with the muscles, enabling them to be light and not restrict the wearer’s kinematics. We describe the biologically inspired design and function of our exosuit, including a simplified model of the suit’s architecture and its interaction with the body. A key feature of the exosuit is that it can generate forces passively due to the body’s motion, similar to the body’s ligaments and tendons. These passively generated forces can be supplemented by actively contracting Bowden cables using geared electric motors, to create peak forces in the suit of up to 200 N. We define the suit–human series stiffness as an important parameter in the design of the exosuit and measure it on several subjects, and we perform human subjects testing to determine the biomechanical and physiological effects of the suit. Results from a five-subject study showed a minimal effect on gait kinematics and an average best-case metabolic reduction of 6.4%, comparing suit worn unpowered versus powered, during loaded walking with 34.6 kg of carried mass including the exosuit and actuators (2.0 kg on both legs, 10.1 kg total).
SOURCES – Harvard, The International Journal of Robotics Research

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.