

Scientists are working on a shape-shifting escape capsule for use with high-speed hypersonic planes which could potentially fly between Europe and Australia in under two hours in future.
Faster than supersonic planes such as Concorde, hypersonic aircraft fly in the atmosphere at speeds over Mach 5.5 and could revolutionize the world of commercial airline travel.
The escape pod is being developed as part of a two-year program called Hypersonic Morphing for a Cabin Escape System (Hypmoces) that will be completed in November.
The project is led by Spain’s Deimos Space, Italy’s Aviospace, and research agencies DLR of Germany and Onera in France.
“[A hypersonic aircraft] will probably require a passenger escape system as the technology for high-energy flight will not be as reliable as for subsonic, mainly the propulsion,” says Davide Bonetti, project coordinator at Deimos told Aviation Week.

The main goal of HYPMOCES is to investigate and develop the technologies in the area of control, structures, aerothermodynamics, mission and system required to enable the use of morphing in escape systems for hypersonic transport aircrafts. A large cabin escape system able to change its shape and automatically reconfigure during an abort event after ejection will balance the compromise between the constraints for the integration within the mother aircraft (compactness), the adaptability to the unpredicted environment in case of abort and the required flight performance to ensure safe landing.
The HYPMOCES project will address key technological areas to enable the use of morphing in hypersonic escape systems, namely:
1. Control and Reconfiguration during morphing
2. System integration within the escape system and within the mother aircraft
3. Structures, materials, actuators and mechanism of the deployed elements
4. Aerothermodynamics of the changing external shape
In addition to the technology aspects, the cabin escape concept feasibility from a system and mission standpoint will be appraised using a high-energy trans-atmospheric transportation scenario.
Project Results
A multidisciplinary design approach has been successfully introduced since the beginning of the project to achieve a satisfactory design of the HYPersonic MOrphing system for a Cabin Escape System (HYPMOCES). This has been possible thanks to the introduction of a Concurrent Engineering Session in the very early phase of the project where all the partners contributed actively in the project objectives. From an initial trade-off of conceptual designs two preliminary design solutions (one baseline and one backup CES morphing system) were designed as an optimum equilibrium of conflicting objectives among the different disciplines involved, namely: mission analysis, flying qualities, GNC, aerodynamics, aerothermodynamics, structure, mechanisms and system. The undeployed (before morphing) CES has been provided as initial concept by DLR as input coming from previous SpaceLiner system studies.
During the Design Loop 1, lasting 9 months, both the Baseline and Backup design solutions have been analysed more in details to achieve a consolidated preliminary design. All the disciplines contributed and interacted in an efficient way reaching solid preliminary design solutions by the end of the Design Loop 1.
More in details, from a high level perspective the following results have been achieved in the different technological areas:
1) Control and Reconfiguration during morphing:
Three cabin escape system configurations have been analysed (the undeployed CES vehicle, the baseline morphing concept, the backup morphing concept). An innovative morphing solution (inflatable sidewalls) has been proposed for the baseline concept. For the three system concepts initial aerodynamics have been refined and extended to a wide range of flight conditions suitable with the mission needs using the HYDRA tool. Flying Qualities (FQ) analyses have been conducted and the flight corridor (AoA entry corridor) for the vehicles has been identified using the reference trajectory. Optimised descent trajectories have been compute from multiple SpaceLiner abort conditions and the optimum morphing point has been identified for each of them.
From a GNC perspective, a symbolic nonlinear model of the dynamics of the cabin escape system, with morphing modelled by a time-varying parameter has been obtained as well as an LFT/LPV model of the cabin escape system; a set of techniques has been identified to evaluate and validate the LFT/LPV models; a mixed- controller and an LPV controller have been synthesized and used as a baseline for comparison and for the definition of the minimum attainable performance; closed-loop analysis of the nonlinear cabin escape model with the mixed- and with the LPV controllers, for different flight conditions, have been performed including the transitions undeployed CES baseline CES, and undeployed CES backup CES; the H estimation theory has been selected as the potentially most appropriate for the problem at hand.
2) System integration within the escape system and within the mother aircraft:
The undeployed CES has been provided as initial concept by DLR as input coming from previous SpaceLiner system studies. This system evolved during the project Design Loop 1 phase as follows. The initial CE study conducted in the Concurrent Engineering Facility at DLR Bremen (where all the project partners were involved) allowed the identification of the Baseline Concept (inflatable side structures and deployable rudders) and of the Backup Concept (small deployable wings instead of the inflatable structure and the same deployable rudders than the Baseline Concept). Preliminary systems analyses were conducted during the CE study and continued afterwards during the full Design Loop 1 for both concepts: Mass estimation, TPS layout, AEDB creation (quick analysis tools), evaluation of trim capability of capsule and orbiter, system requirements for morphing systems, identification of critical flight points (output to WP5), trade-off between supersonic and subsonic deployment of morphing structure.
3) Structures, materials, actuators and mechanism of the deployed elements:
During the Design Loop 1 period, designs and analyses of the Baseline and Backup concepts have been performed. In detail, a study of TPS that is needed for the extreme environment which these structures will survive and the complete design of structures and mechanisms that are necessary to deploy the aerodynamic surfaces has been completed. Also, analyses for these components in order to valuate which materials are needed for these structures, and if these structures and mechanisms withstand applied loads have been done. Furthermore, it has been performed a preliminary thermo-mechanical specification for both concepts, in order to have environmental data extrapolated by nominal flight conditions already available plus an engineering estimate of the emergency loads in terms of accelerations, applied pressure, thermal flux and overall emergency phase duration. System, functional, mechanical, thermal and electrical requirements have been defined in order to properly design the morphing system. All the requirements have been collected in the thermo-mechanical environment specification document. Detail designs of structures, deployment systems and TPS have been accomplished for the two concepts and reported.
4) Aerothermodynamics of the changing external shape:
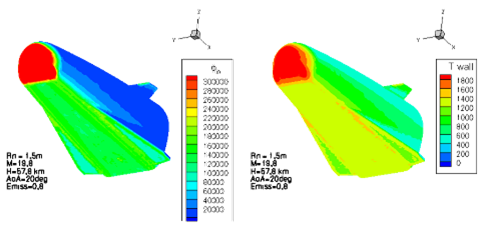
During the Design Loop 1 period, the three geometries (undeployed, Baseline and Backup) were calculated using the pre-design tool FAST to determine the aerodynamic coefficients as well as the heat fluxes. A surface meshing activity has also been conducted to generate stl files shared with other partners. 3D meshes for the undeployed, baseline and back-up configurations have also been generated. In addition to preliminary FAST aerothermodynamic results, Navier Stokes calculations were run and converged for the flight conditions of interest.

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.