

In 2016, Jian Nong Wang and his colleagues made nanotubes with a process akin to glass blowing: Using a stream of nitrogen gas, they injected ethanol, with a small amount of ferrocene and thiophene added as catalysts, into a 50-mm-wide horizontal tube placed in furnace at 1,150–1,130 °C.
They packed the nanotubes even more densely by pressing the film repeatedly between two rollers.
The resulting films had an average strength of 9.6 gigapascals. By comparison, the strength of nanotube films made so far has been around 2 GPa, while that for Kevlar fibers and commercially used carbon fibers is around 3.7 and 7 GPa, respectively. The films are four times as pliable as conventional carbon fibers, and can elongate by 8% on average as opposed to 2% for carbon fibers.

DRUM ROLL Spooling a cylinder of blown carbon nanotubes onto a rolling drum, researchers create a black film containing aligned, densely packed nanotubes (left). After being passed through a roller several times, the film becomes flatter and the nanotubes more densely packed (right). The film is exceptionally strong and ductile.
Credit: Nano Lett
This will mean rockets and spaceplanes that go at about Mach 8 will be able to rendezvous with rotovators. This will reduce the cost of putting things into orbit by about ten times.



There was a NASA study of hypersonic skyhooks that determined the best designs and the strength of materials needed. No show-stoppers were uncovered. However, the elements of the concept require further development and refinement and then actual implementation programs. They have to build and test hardware to make the engineering work reliably.
Depending upon the tether system design the tether being over two times stronger will reduce the weight of the needed tether by 5 to 20 times. Keeping the weight of the system about the same would allow a lower performance hypersonic vehicle to make a rendezvous. Something that say only went mach 8 instead of mach 15.
Most of that mass ratio requirement is driven by the fact that the tether system must mass considerably more than the payload it is handling, so that, upon pickup of the payload by the tether, the payload will not pull the space tether system down into the atmosphere. The higher strength carbon nanotube tethers at higher temperatures will not be used to lower the tether system mass significantly, but instead will be used to increase the tether safety margins, lifetime, and system performance, by allowing payload pickup at lower altitudes and lower speeds, thus decreasing the performance requirements on the hypersonic airplane portion of the system.
The 2000 NASA study Assumed a Boeing Designed Hypersonic Vehicle
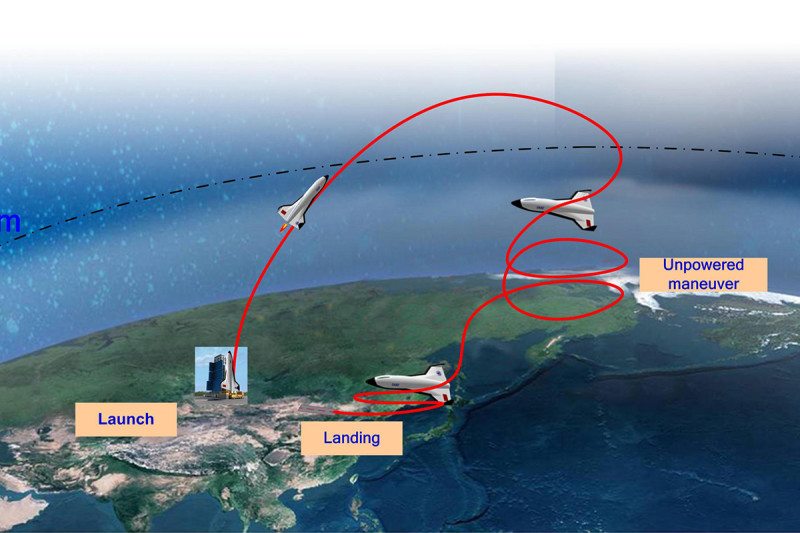
For the hypersonic airplane portion of the baseline HASTOL system we use an existing Boeing design for the DF-9, a dual-fuel airbreathing vehicle that has benefited from over a million dollars in NASA/LaRC and Boeing funding during prior study efforts. The Boeing DF-9 hypersonic airplane is similar to the X-43 research vehicle in shape and uses engines similar to those that will be tested in the X-43 in the Summer of 2000. The DF-9 has a 9 m (30 ft) long by 3 m (10 ft) diameter upward-opening central payload bay that can handle payloads up to 14 Mg (14 metric tons or 30,000 lb). It uses JP-fueled air-breathing turbo-ramjets up to Mach 4.5, and slush-hydrogen and air/oxygen ram/scram engines above Mach 4.5. With a full fuel load at takeoff, the hypersonic airplane masses 270 Mg (590,000 lb) or a little less than 20 times the 14 Mg payload mass, and can deliver the payload to 100 km (330 kft) altitude at an apogee speed with respect to the surface of the Earth of 3.6 km/s (12 kft/s) or approximately Mach 12. If we assume an eastward equatorial launch at the equator, the speed of the airplane with respect to inertial space is 4.1 km/s — halfway to space.
Cheaper suborbital vehicles could be possible. Something with better performance than Scaled Composites SpaceshipTwo (which goes up to Mach 3) or if some hypersonic scramjets can be made.
Capturing the Payload
The NASA study looked at seven configurations resulted from the functional allocations between the hypersonic vehicle, payload accommodation system, and grapple assembly, focusing on methods in which to remove the payload from the hypersonic vehicle:
· Configuration 1 – Mechanical Arm on Hypersonic Vehicle
· Configuration 2 – Mechanical Arm on Grapple Assembly
· Configuration 3 – Atmospheric Vents Lift Payload out of Cargo Bay
· Configuration 4 – Payload Powers Itself Out of Cargo Bay
· Configuration 5 – Payload Ejected, Cradle/Clam Shell Mechanism captures
Free-falling Payload
· Configuration 6 – Electromagnet on Grapple Assembly Removes Payload
· Configuration 7 – Electromagnet on Payload Pulls it from Bay to Grapple AssemblyNo one design solution can be offered at this early phase of development; however, several of the configuration options have shown that some more investigation needs to be made into quantifying the impacts of functional allocations within the HASTOL system architecture. Any of these could be designed to make a working HASTOL system; the questions that must be answered are, “Which one has the best reliability for the lowest operating cost,” and “Which one is more easily adapted to take advantages of technology advances?”
Configurations 1, 4, 5, and 6 represent the diverse span of functional allocations within the HASTOL architecture. Configuration 1, with the mechanical arm on the hypersonic vehicle, is a more traditional configuration that builds on a rich, past experience with Space Shuttle missions and ISS design, testing, and cost data. A revolutionary, new means of payload delivery to space should look at this traditional option (as a gauge, as well as a design solution) along with some other options that are more unconventional. Configuration 4 is the only option that requires the payload to remove itself from the cargo bay. It introduces a different type of consumable to the HASTOL system, the payload adapter, which may or may not be cost effective as well as performance effective. Configuration 5, with the payload being ejected from the cargo bay, has a simple, grapple assembly operation concept; it does need more investigation into timing, repeatability, and capture impact loading on the tether tip. Configuration 6, with the electromagnetic grapple, should be investigated as a soft docking design solution. A less powerful electromagnet could be used to soft dock the grapple to the payload before a hard dock,using any of the above hard dock suggestions, captured the payload. Though a mechanical arm on the orbiting grapple assembly is viewed as unnecessarily complex, the tether-based solution to increasing the capture window should be investigated for any type of grapple assembly that is used. The operational dynamics are a little more complex with this solution, but it has a great chance of increasing the capture opportunity window, especially when teamed with other design solutions aiming at that same end.
Rotovator Variants
A rotovator is a tether that rotates more than once each time it orbits around a planet or moon. Rotovators rotate in the same sense as they orbit such that the lower tip has a retrograde motion relative to the center of gravity. Rotovators in almost all ways have the same benefits as skyhooks. However, due to the retrograde velocity, the lower tip can achieve a specified Mach number with a shorter tether. This, despite the rotational forces, produces lower stresses in the tether so that lower strength to weight ratio materials can be used for the same results.

The new carbon nanotube tethers would perform better than the 2X strength tether and would be 3 times the strength of Spectra 2000. You can always choose the longest tether, which has the best performance and the design still weight is still about at the level of the shortest or close to shortest Spectra 2000 design.
The CardioRotovator concept consists of a Tether Central Station in an elliptical orbit, with a single long tapered tether. The tether rotation rate is chosen to be exactly twice the orbital period. The CardioRotovator gives somewhat better results than the Rotovator. In general, however, the length of the CardioRotovator tether is much longer than the length of the Rotovator tether, which leads to greater concern about collisions of the tether with other objects in space. This concern is partially compensated by the fact that the CardioRotovator tether spends most of its time at high altitudes where there is less traffic.

Two Stage Tethers – More Complicated Design – But Lighter



Carbon nanotube tethers are expected to maintain strength better at higher temperature ranges
FURTHER READING
Lunar Space Elevator
Better space elevators for the moon will be possible as well. Note: a lunar space elevator can be built now from existing high volume fibers.
A lunar space elevator using existing high-strength composites with a lifting capacity of 2000 N at the base equipped with solar-powered capsules moving at 100 km/hour could lift 584,000 kg/yr of lunar material into high Earth orbit.
Rather than waiting for carbon nanotubes to be developed into structural materials, we can use existing high-strength materials such as T1000G carbon fiber, or, with protective coatings, Spectra 2000, Zylon, or Magellan M5. These all have breaking lengths of several hundred kilometers under 1 g, and would require taper ratios of less than ten between the base and the Lagrangian balance points.
Current composites [before new CNT tethers are available] have characteristic heights of a few hundred kilometers, which would require taper ratios of about 6 for Mars, 4 for the Moon, and about 6000 for the Earth.
The CNT taper ratios would be about 3 for Mars, 2 for the Moon and 500 for the Earth.




The new material only has a density of 1000 and GPA of 9 to 10 so it will still be 70% better than an improved M5 fiber. About a 900 km breaking height.
Mars-Phobos Space Elevator
A Mars Space elevator could be made far better and lighter with the new materials

The approach would take advantage of the unique configuration of Mars and its moon Phobos to make a transportation system capable of lifting frequent payloads from the surface of Mars to space and accomplishing this at a low cost. Mars would be used as the primary location for support personnel and infrastructure. Phobos would be used as a source of raw materials for space-based activity, and as an anchor for tethered carbon-nanotube-based space-elevators to help raise people and payloads from Mars to space. One space-elevator would terminate at the upper edge of Mars’ atmosphere (6,000 km long). This terminus would only be moving about 0.52 km/s relative to the surface. Small craft could be launched from Mars’ surface at a modest velocity and small rockets used to rendezvous with and attach the craft to the moving elevator tip. Staged cable lifts could then raise modules from the craft to Phobos, then the empty craft detached and landed with a paraglider. Landing on Mars from space could be done directly with a combination of aerobreaking and use of a large paraglider to land.
Another space-elevator would be extended outward of Phobos an additional 6,000 km to launch craft toward the Earth/Moon system or the asteroid belt. Release at the outward elevator tip velocity of 3.52 km/sec would result in a hyperbolic velocity of about 2.6 km/sec. This is the Hohmann elliptical transfer velocity needed to reach the Earth/Moon system, and is also nearly the transfer velocity needed to reach the inner edge of the asteroid belt. This velocity boost would considerably reduce onboard propellant needs for space transportation. This outward elevator tip could also be used to catch arriving craft, with staged elevators also bringing the vehicles or carrier modules from the vehicles to Phobos.
These space-elevators would allow low cost movement of people and supplies from Mars to Phobos and from Phobos to interplanetary space. This approach would allow Mars to be used to support an extensive space industry. In addition, large quantities of material obtained from Phobos could be used to construct space habitats and also supply propellant and material for space industry in the Earth/Moon system as well as on and around Mars.


SOURCES- Chemistry and Engineering News, New Scientist, NASA

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.