

A team of Harvard University researchers with expertise in 3-D printing, mechanical engineering, and microfluidics has demonstrated the first autonomous, untethered, entirely soft robot. This small, 3-D-printed robot — nicknamed the “octobot” — could pave the way for a new generation of such machines.
Soft robotics could help revolutionize how humans interact with machines. But researchers have struggled to build entirely compliant robots. Electric power and control systems — such as batteries and circuit boards — are rigid, and until now soft-bodied robots have been either tethered to an off-board system or rigged with hard components.
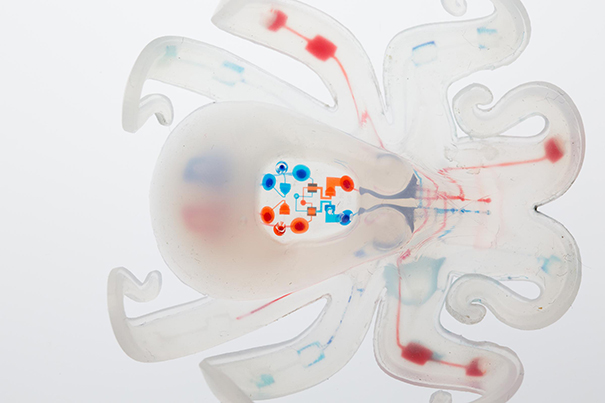
The “octobot” is a squishy little robot that fits in the palm of your hand and looks like something in a goody bag from a child’s birthday party. But despite its quirky name and diminutive size, this bot represents an astonishing advance in robotics.
According to the Harvard researchers who created it, it’s the first soft robot that is completely self-contained. It has no hard electronic components—no batteries or computer chips—and moves without being tethered to a computer.
The octobot is basically a pneumatic tube with a very cute exterior. To make it move, hydrogen peroxide—much more concentrated than the kind in your medicine cabinet—is pumped into two reservoirs inside the middle of the octobot’s body. Pressure pushes the liquid through tubes inside the body, where it eventually hits a line of platinum, catalyzing a reaction that produces a gas. From there, the gas expands and moves through a tiny chip known as a microfluidic controller. It alternately directs the gas down one half of the octobot’s tentacles at a time.
The alternating release of gas is what makes the bot do what looks like a little dance, wiggling its tentacles up and down and moving around in the process. The octobot can move for about eight minutes on one milliliter of fuel.

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.
Comments are closed.