

Canada’s Loblaw supermarkets is pre-ordering 25 Tesla electric trucks by placing a $5000 downpayment on each. They will also convert all of their fleet of 350 trucks to Tesla electric trucks by 2030. Tesla will not complete their first trucks until 2019.
Platooning will be revolutionary in cost with energy efficiency and fewer jobs
In Elon Musk’s presentation he indicated how the trucks by themselves would have 20% lower operating costs per mile than regular diesel trucks. However, by themselves for an unproven technological product the risk to adopt the electric semi truck for a commercial business would be too great for that much improvement.

It is the potential to cut costs in half by having several trucks platooning and drafting off each other which will make the Tesla electric truck revolutionary. It is not just the 10-20% extra energy efficiency. It is the need for only one experienced truck driver in the lead truck. At most regulations and security might require one low skilled driver for the following trucks or just one mall cop like security person.
Driver costs are 75% of the total cost of trucking.

With regulatory approval there is the potential to eliminate the need for drivers in the trucks that are following the lead truck.
Security considerations from the increased potential of hijacking
There are extra non-obvious security considerations for the platooned trucks. Eventually Tesla and their customers will have to expect the exact operations of the trucks to be commonly known. Truck hijackers and hackers will be able to target the trucks with full knowledge of how they work. They would be able to adapt attacks to say isolate the rear trucks while jamming.
2016 Column of 6 robotically convoyed trucks drove across Europe
Other projects in Europe have been working on platooning trucks for over a decade.
In 2016, a European self driving truck experiment known as the European Truck Platooning Challenge drove across Europe.
The European Truck Platooning Challenge, organised by Rijkswaterstaat, featured DAF Trucks, Daimler Trucks, Iveco, MAN Truck and Bus, Scania and Volvo Group; driving in platoons across national borders. This was a global first. Truck platooning means that two or three trucks connected by wifi drive in a column, with the first truck determining the speed and route. This enables shorter gaps between following trucks, while freeing space for other vehicles. The wifi connection between the trucks ensures synchronized braking and can prevent sudden jolt/shock effects. This is good news for traffic flows and speeds up deliveries. Truck platooning can realize up to ten per cent fuel savings.
Six columns of trucks arrived at Maasvlakte II after they had driven from a number of European cities to Rotterdam over the past several days.


Shipping a full truckload from L.A. to New York costs around $4,500 today, with labor representing 75 percent of that cost. But those labor savings aren’t the only gains to be had from the adoption of driverless trucks.
Where drivers are restricted by law from driving more than 11 hours per day without taking an 8-hour break, a driverless truck can drive nearly 24 hours per day. That means the technology would effectively double the output of the U.S. transportation network at 25 percent of the cost.
Trucking represents a considerable portion of the cost of all the goods we buy, so consumers everywhere will experience this change as lower prices and higher standards of living.
There are currently more than 1.6 million Americans working as truck drivers.
Princeton study of the timeline for Truck Platooning
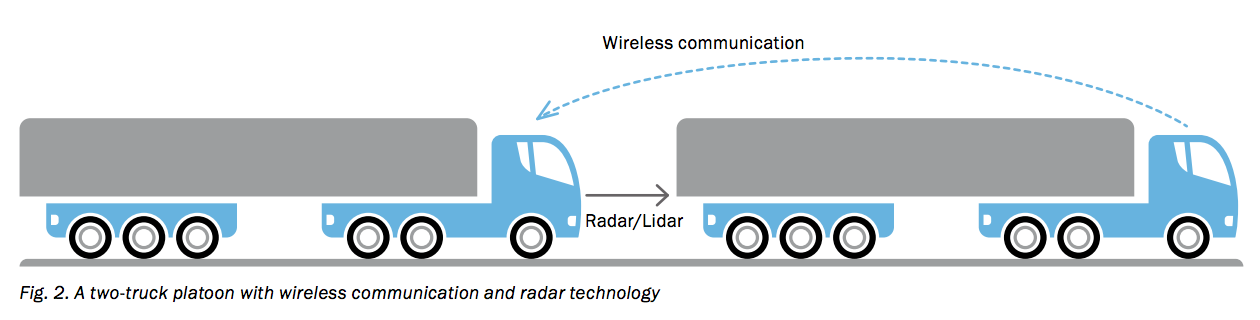
A platoon of two trucks is like a short train driving on the road, with the trucks driving very closely
behind each other. The distance between the two trucks can really be extremely small – creating a desirable form of tailgating. The distance can be as low as 0.3 seconds, which at 80 km/h is about 6.7 metres distance between the vehicles. Driving so close together is made possible by advanced Automated Driving technology, in conjunction with wireless vehicle-tovehicle (V2V) communication that makes it possible that the vehicles communicate with each other.
Once platooning is activated, a Following Vehicle in the platoon trails the Leading Vehicle. The Following Vehicle now follows the Leading Vehicle automatically, without interference of its driver. Because the vehicles are able to communicate with each another, they can adjust their speed and position without the typically delayed response time of a human driver. The vehicles communicate both ways, so also the Leading Vehicle can adjust its speed or position based on the response of the Following Vehicle. And since the vehicles are wirelessly coupled, it is possible to easily hop-on and hop-off from the platoon on-the-fly. There is no need to stop driving; connecting to a platoon or disconnecting can happen while driving by a push of a button.
Truck platooning has great potential for reducing transport costs, by lowering fuel consumption due to improved aerodynamics from reduced air resistance, eliminating the need for an attentive driver in the second vehicle, and better usage of truck assets, by optimisation of driving times and minimisation of idle time. On the societal level, driving safety increases as typically 90% of all accidents are human-induced, and platooning technology prevents human errors, leading to less accidents and damages. Greenhouse gas and air-quality related emissions decrease, and congestion and traffic jams are reduced.
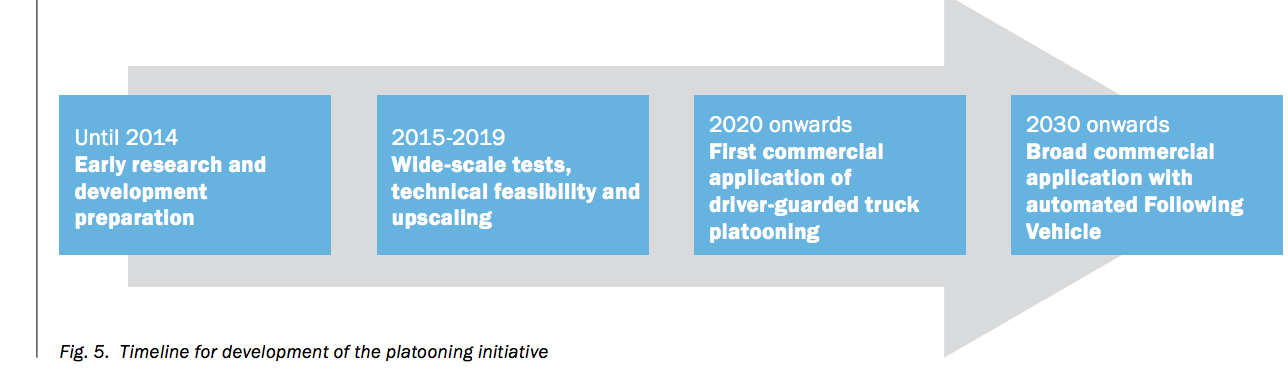
A phased implementation is crucial for widespread acceptance of platooning technology in the society at large, and especially of other road users. We expect that large-scale deployment in the commercial transportation industry is possible within approximately a five year period (see Fig. 5), so that in 2020, a form of truck platooning (e.g., SAE levels 2 or 3) is legally permitted and commercially available. More extensive applications of platooning (e.g., SAE level 4 or 5) are not expected before 2030. Of course, there is a fair amount of guesswork in this timeline, as timing is very much dependent on political support, innovation funding, technological advancement and public acceptance. This timeline is elaborated in Section 6.2, in which we propose to commission a five-year Dutch open innovation programme towards the goal of commercial platooning in 2020.
In terms of development process, we might compare truck platooning with the growth trajectory of the LZV developments in the Netherlands. Initial small-scale experimentation started in 2000, the first wide-scale tests initiated in 2006. Final developments were wrapped up in 2012 when the LZV was officially allowed on Dutch main roads, so about 6 years later. Leveraging the encouraging experience of the LZV, we expect that developments will be along the lines of the LZV, such that platooning trucks are officially allowed on Dutch main roads in about five years’ time. Required changes to European legislation and alignment in Dutch legislation with regard to driving/resting times (EC 561/2006) and the digital tachograph (EEC 3821/85) legislation will be among the greatest threats to this timeline, as well as the technological difficulty associated with ensuring robust control over the platoon under all circumstances.


Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.
The solution to platooning and ramps is obvious move all the platoons two the left lane. This should have been done a long time ago.
Through trucks driving through the cities with several lanes have absolutely no business being in the right lane. Where a huge amount of interaction happens between trucks and cars. Trucks should use the far left lane for driving two cities.
As for Tesla Truck platooning advantages, remember that platooning is not limited to electric trucks. And the diesel world is not standing still. By the time Tesla truck comes out platooning will probably be a standardized feature on all new trucks and cars.
That’s a huge throughput hit on a two-lane freeway. You really, really need a passing lane, and you can’t put a platoon in it.
<>
Or 2 drivers taking turns at work/rest, for uninterrupted (save pitstops)
The big problem is on-ramps. Cars can’t merge onto a highway safely if a platoon of 6 trucks is covering up the merge area for longer than the cars can adjust speed on the on-ramp. And the platoon can’t merge safely without some way of clearing cars efficiently from the merge lane.
Three possible solutions:
1) Break up the platoons on or near on-ramps. Each truck merges on its own, and then forms up as the intervening cars get squeezed out. (How you “squeeze out” the intervening cars is a good question, but that’s something that the ordinary driver can probably get used to.) Assuming you only have to do this once, the impact on range is probably negligible.
But once it’s on the highway, if the platoon has to break up and reassemble every time it passes an on-ramp, that’s a big deal. Near a metropolitan area, the net result of that is that the platoon will probably spend more time disassembled than reassembled. Not only does that have a huge impact on range, it also will strain the automation, possibly beyond reasonable safety limits.
2) Require platoons to merge left (or right, if you live in one of those places that drives on the wrong side of the road) at least one lane as soon as possible. But this has huge implications for traffic flow on two-lane highways (because the platoons are in the passing lane all the time).
3) Metered on-ramps, which are already in use in some cities. A traffic signal stops the merging cars, then tells them when it’s safe to start the merge process from their stopped state. But using this for managing merges around platoons requires reliable communication between the road and the signaling system. That doesn’t exist today, and is a pretty big infrastructure change.
I guess that there’s a reasonable argument to be made that, if most metro areas have at least 3-lane highways, a disassembled platoon can make its way to and from the “platoon lane” without too much impact on range. Then, if most rural areas only have 2-lane highways, the number of on-ramps is low enough that platoons can disassemble and then reassemble for each ramp they pass, with only a limited range penalty.
One other issue: Platoons are subject to a very simple kind of maliciousness: Cars that refuse to allow the platoon to form up, ever. This would pretty much destroy the economic case.
Ordinary drivers would probably get tired of this kind of game pretty quickly, but I can think of one group that would have a vested interest in organizing this sort of attack and sticking with it: the teamsters’ unions. If platoons fail, there’s a lot more demand for truck drivers.
Bottom line here is that platoons are a pretty marginal strategy until the infrastructure changes to accommodate them. Dedicated lanes with good instrumentation would be ideal, but they’re very, very expensive.
Just as the authorities were able to introduce rules making it illegal not to give way to buses pulling out of a bus stop, so to they can make it illegal to not give way to merging platoons.
You don’t care? Well the robotrucks already have cameras integrated with computers and communications tech. Your licence plate will be send directly to the traffic cop computer. The fine will be sent directly to your address. Maybe the money will go directly from your account to the authorities.
All a seamless process.
It might be a bigger source of profit than the wage savings in the first place.
Regardless if giving way to platoons is enforced legally or not, it might mean that the onramp traffic will come to a full stop when there is a long platoon. They would then have to accelerate from a standstill in order to merge with the traffic after the platoon, which seems like a safety issue.
Autonomus and interconnected vehicles would probably solve the problem.
The cars won’t have a problem merging from a dead stop providing they can accelerate from 0-100 in under 3 seconds.
See, it’s all a seamless web of cross product promotion.
Yeah, and that cross product is really important in imparting enough Lorentz force on the wheels…
Brian seems to have yanked my longer comment on this, but the issue isn’t the cars giving way to merging platoons; it’s the platoons giving way to merging cars. If you work out speed differences of 20-30 mph between the platoon on the freeway and the car on the ramp, the car can be hemmed in for upwards of 15 seconds on the ramp. The cars’ll run out of room in that situation and wind up stopped on the shoulder–if you’re lucky.
I was responding to:
Clearly with such a large original comment I should be more specific if I respond to only one point of many.
Ah, gotcha. (Frankly, I kinda went into TL;DR mode when I considered rereading it. There’s a lesson in there somewhere.)
That’s a good point. You certainly could make a traffic law that said it was illegal to fool with a platoon for longer than it reasonably took for you to merge or exit safely. However, it might be hard to enforce. “Oh, I wanted to change lanes, but I’m a really timid driver and I wanted to be sure that everything was completely clear. Sorry I slowed down so much but, like said, I’m a really timid driver…” “Oh, sorry, I saw the big gap in the platoon and I thought my exit was coming up, so I merged over. Then it turned out to be the wrong exit, so I figured I’d just hang in there until the next one…”
Plus: what’s the fine structure? More than the teamsters’ union is willing to pay? I don’t think that the general public is going to be very sympathetic to draconian punishments to benefit trucking companies.
Things are much, much easier if there’s a dedicated lane, or at least a center lane. Once the platoon forms up, if it doesn’t need to let anybody through it until it’s ready to exit, the opportunities for mischief go way down.
4) Passenger traffic moves to autonomous VTOL aircraft and leaves the roads mostly to autonomous trucks and platoons.
Sold, as long as I get to have a Mr. Fusion on the back of my deLorean.
Don’t know about the Mr. Fusion, but a DeLorean can be arranged:
http://www.deloreanaerospace.com/
I expect that the whole notion of convoying will get abandoned with the first horrible multi-truck accident. It seems that the probability of the convoy getting in an accident will be the same as the first truck getting in an accident. But the severity of the accident will be proportional to the number of trucks in the convoy
I would not want to be the one underwriting Tesla’s liability insurance. An “extremely small” 6.7 meter separation pretty much guarantees that one truck hitting something will turn into a chain reaction pile up. The closest analog I can think of is when you have an impenetrable fog descend on an interstate and those driving into it suddenly can’t see more than a few meters in front of them. Usually what then happens is that someone doesn’t slow down to the kind of speed that the conditions dictate and plows into a vehicle in front of them, which turns them both into fixed obstacles that cars and trucks behind them plow into in turn. That generates the kinds of mass casualties that I would expect from an accident involving platooned trucks. Moral of the story- you can use automated driving to make the roads safer OR you can use it to squeeze additional capacity out of the existing roadway. What I find dubious at best is the proposition that you can do both of those things simultaneously.
So what prevents diesel trucks from platooning? Tesla isn’t the only company with driverless technology. There isn’t yet enough real-world data on the safety of the platooning technology.
Musk is saying tesla will implement it first. If someone else will more power to them
Main factor behind the Tesla Semi economics is the garanteed 7cent/kWh electricity price at megacharger stations.
Charging at anywhere else could be _a lot_ more expensive
https://www.eia.gov/electricity/monthly/epm_table_grapher.php?t=epmt_5_6_a
Right now the average costs of electricity is $0.0110 per KWH. Also, the low for the last 5 years was $0.096 KWH. To me the number quoted by Tesla seems bogus.
When you make your own solar panels and storage batteries/produce and store your own electricity you cut out many middle men so the price should be lower. This is where tesla’ expertise in solare and utility scale battery packs gives it competitive advantage.
Industrial rates are always lower than residential. About 7 cent national average.
https://www.eia.gov/electricity/monthly/epm_table_grapher.php?t=epmt_5_6_a
Fine, but unless Tesla decides to open truck charging stations and pass through the electricity at industrial rates then your assumption is wrong. If a truck recharges at a remote location from an independent charging station it will be lucky if the cost is anywhere close to the retail rate.
I know that Tesla is a purist about EVs but a hybrid truck actually makes a lot more sense, at least until the cost of the batteries drop a lot more. At least hybrid trucks wouldn’t have to rely on running in convoys to be economically viable.
There is one factor that lets pure EV work for trucks.
Personal cars mostly have to be jack-of-all-trades. One vehicle to do a range of different jobs, and if you suddenly have to drive to another city, then you use the same car you commute to work in.
But trucks can, and often are, bought for a specific job. Many operators got this truck here to do this particular job, and it can be specialized for this purpose.
So, if your particular run from the Widget factory to the wodget plant and back suits the range and recharge character of the electric truck… then you can get the ET and be OK with that.
Of course there are a lot of trucks that DO need flexibility, but you know ahead of time which sort you need.
At 7 cents it would be worth while in many places to go charge up at a megacharger and then plug in to power your home.
So that’s not sustainable.
Including battery depreciation? And time wasted?
I was assuming the truck driver was going to refill his rig anyway, not make a special trip.
Ok. Still, there is the extra wear on the battery.
You going to take a semi home to recharge your house…. ooook.
A single Tesla truck won’t break even against a diesel until about 1.1 million miles driven. Platooning reduced energy consumption but that isn’t the cost of the Tesla truck, it is the purchase price.
Really platooning saves you the overhead of a driver (which is substantial). The catch of course is that there is no real reason why you can’t make a platooning kit for diesel trucks. Base it on the SARTRE system which as far as I can tell is a decade further along then anything Tesla has.
See my comment down-thread, but there are lots of reasons why platoons have to break up and re-form. I wonder how much the extra acceleration and control you have with an electric truck reduces the time to re-form. Having lots of torque at relatively high speeds could be a big deal. (Of course, this requires that the robot trucks basically drive like assholes…)
That extra acceleration if used imprudently will also result in a loss of efficiency so there is a trade-off when reforming convoys.
Robotice driving will eventually be a lot more precise than human so extra acceleration and braking power will be a key.
If you get to the point where everybody’s driving automated stuff with vehicle-to-vehicle communications, then merging really isn’t very demanding, because you can make room for both cars and platoons to merge long before they get to the on-ramps. But that day is so far in the future that the cost difference between electric and diesel trucks will be a lot smaller.
I suspect that the acceleration losses are negligible compared to the aerodynamic losses from running in an unplatooned state.
Your 1.1M miles breakeven doesn’t hold water.
As I calculated in a previous thread:
Price per kWh: $124 (currently, will be lower when Semi arrives)
Range: 500 miles
Consumption: 2 kWh/mile
Battery size: 1000 kWh
Battery cost: $124,000
Sources:
https://electrek.co/2017/02/18/tesla-battery-cost-gigafactory-model-3/
https://www.tesla.com/semi/
Tesla still doesn’t list a price. They are saying a 2 year payback period although this probably assumes all charging is done at Tesla chargers instead of at a depot (where the truck spends most nights).
Assuming your numbers then the Tesla semi comes with a roughly 124k premium over a normal semi. Assuming 100% charging at tesla chargers and no platooning that means you need to drive 124,000/0.25 = 496k miles before breakeven.
1.1 million miles was from another article. Musk really needs to release the price of the semi.
No not 124k premium. Tesla semi doesn’t have expensive diesel engine, transmission and bunch of other crap ICE trucks have. Probably about 50 K premium.