
Atomically precise manufacturing will lead to a host of innovations. By building structures atom by atom, you’re able to create new, extraordinary materials. We can remove impurities and make materials stronger and more heat resistant. We can build quantum computers. It could radically lower costs and expand capabilities in medicine and other areas. For example, if we can better understand DNA at an atomic and molecular level, that will help us fine-tune and tailor health care according to patients’ needs. The possibilities are endless.
A big problem for the last 35 years is that atomic force microscopes can pick up and move atoms but they have had the tip crash into the samples which causes a lot of damage. The solution is to get a tighter feedback loop to prevent tip crashes.
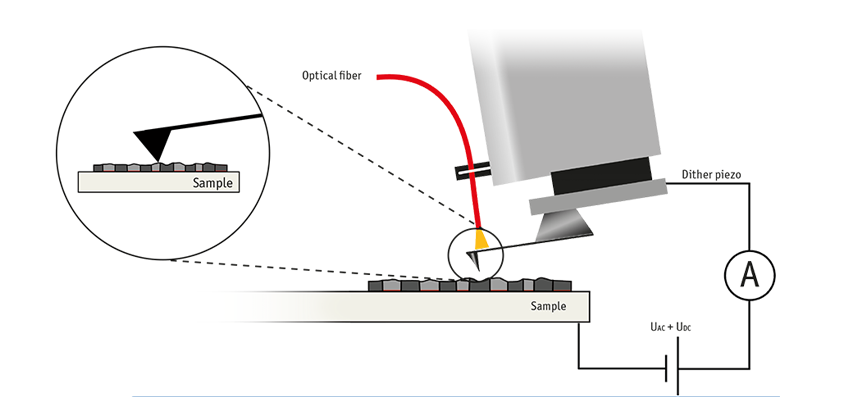
The AFM tip is moving from one atom to another, across an uneven surface. It is not flat. Because of that, the distance between the sample and tip changes, as does the current between them. While the controller tries to move the tip up and down to maintain the current, it does not always respond well, nor does it regulate the tip correctly. The resulting movement of the tip is often unstable.
There is a new way to measure the local barrier height and adjust the gain on the control system that demonstrably keeps the tip out of trouble.
A common cause of tip-sample crashes in a Scanning Tunneling Microscope (STM) operating in constant current mode is the poor performance of its feedback control system. We show that there is a direct link between the Local Barrier Height (LBH) and robustness of the feedback control loop. A method known as the “gap modulation method” was proposed in the early STM studies for estimating the LBH. We show that the obtained measurements are affected by controller parameters and propose an alternative method which we prove to produce LBH measurements independent of the controller dynamics. We use the obtained LBH estimation to continuously update the gains of a STM proportional-integral (PI) controller and show that while tuning the PI gains, the closed-loop system tolerates larger variations of LBH without experiencing instability. We report experimental results, conducted on two STM scanners, to establish the efficiency of the proposed PI tuning approach. Improved feedback stability is believed to help in avoiding the tip/sample crash in STMs.

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.