

Tesla has released new video of the Optimus Teslabot. They are showing vastly improved balance and hand control. The critical thing is like the FSD (full self driving ) for cars, all of the training is all neural nets and video in and capabilities out.
Tesla could begin mass producing Teslabots in November with Tesla factory made actuators.
Optimus can now sort objects autonomously 🤖
Its neural network is trained fully end-to-end: video in, controls out.
Come join to help develop Optimus (& improve its yoga routine 🧘)
→ https://t.co/dBhQqg1qya pic.twitter.com/1Lrh0dru2r
— Tesla Optimus (@Tesla_Optimus) September 23, 2023




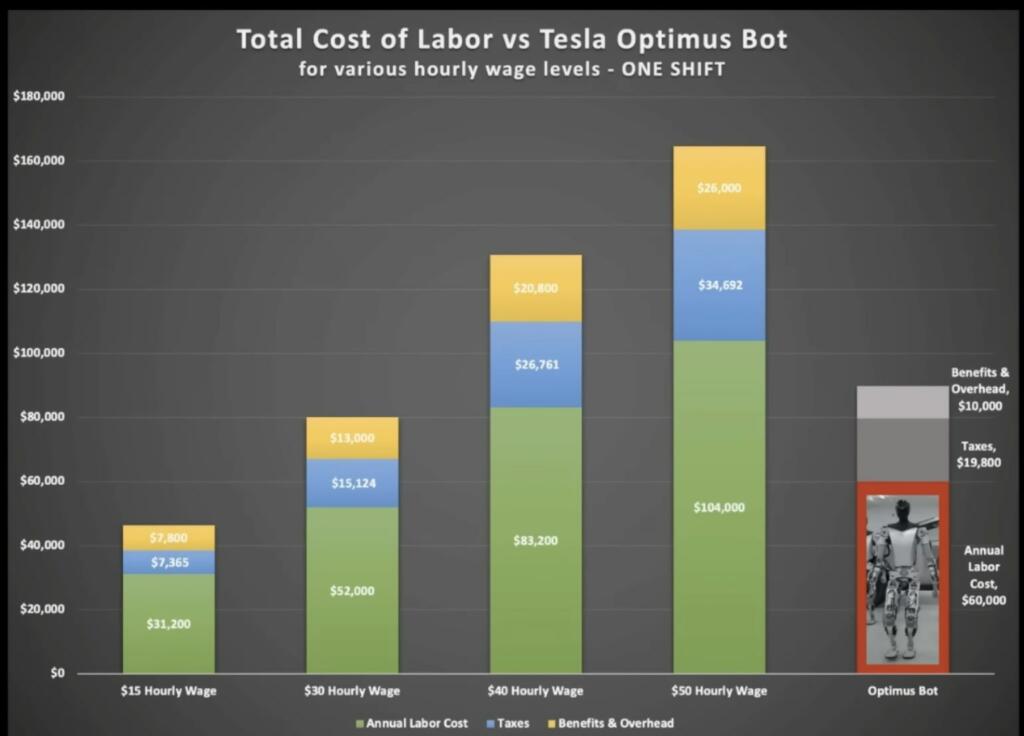
Dr. Scott Walter has cofounded 2 robotics companies. He goes in depth about the business model for Tesla’s Optimus humanoid robot. He shares his calculations for the value of the bots and comparing the costs of the bots to total cost of labor. What happens if the bot can do one shift, two shifts or even 3 shifts? He will review what he calls the SCOTT Bot model. Saved Costs of Teslabot Transition.

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.
I would love to see this be successful, both technically and financially. It would represent a big step towards where I believe we have to go.
Yeah, but can it dance?
wait til it can have sex! then its super weird time
Looks fast enough for some useful task. That video was probably shot a few times and they choose the one without errors. Nevertheless Tesla vision based neural net approach is good. Otherwise you would need to much specific programming to do something and even then,….
Even if they had to do okay retakes, this is still impressive. In the white this game is supposed to work, the robots will get better at task over time. This is astounding for such a short time time it took them to get here. I would not be surprised if Elon a few months from now ,judging on the pace of innovation going on at Tesla in this endeavor, actually exists Engineers to make a special Tesla Bot they can do parkour just the troll other robot makers like Boston Dynamics. A special Bot using neural networks for all the stunts would show how impressive what Tesla is doing to the general public.
Why is mass production imminent? Did Elon Musk say so, or is that just a guess? Looking at the demos, the robots seem to be years from doing useful work in factories
It’s the same with NN FSD; they need to get the BOTs out there so they may learn. Instead of maybe 100 in-house units, they’ll have a million out in the field; video in, controls out.
There are hundreds of thousands of factory jobs suited to the current level of performance. For example in warehousing and distribution there are a lot of human workers doing “unitizing” which is just standing by a conveyor or machine and putting parts into boxes continuously. No more speed or skill needed than shown in the video. Up to now it has been very hard to automate since these are typically lots of different parts or groups of parts and different boxes. For the auto industry, most parts come from the supplier presented for assembly line use, only a fraction go into the aftermarket parts supply – but those have to be boxed. Workers doing this cost $60 an hour in the US and one Optimus could replace three shifts. If Optimus cost $100k it would pay for itself in less than a year doing this.
It would need to be safe around humans and adaptable enough to move to different places and handle a variety of different objects and boxes without separate training for each situation.
Why doesn’t the Tesla ‘bot change to both arms activity for wear balancing?
Maybe because it’s trained off human video, and most humans are handed?
Aren’t the Humanoids supposed to be solid black, not black and silver?
Though I don’t fundamentally believe that the human shape and massing is the ideal form for any natural or artificial activity, service, or ‘generalized’ job role (it’s closer to the praying mantis within the 6’x3’x2′ box), I do -grudgingly- admit that the form and its gradual capability roll-out provides a compelling business model/ promotional scheme/ market draw for getting people to ‘buy in’ to the possible world of augmented humaniform artificial assistants/ workers/ labor forces’ industry (sell the dream if not the practicality – looking at you Apple). Aging-in-place and resource exploitation sectors are certainly in dire need of cheaper, widespread staff against a likely acceleration of ‘above the current standard’ expectations. It has yet to show that it is moving out of the ‘more trouble than it is worth’ zone as the BEV industry is slowly starting to do in some limited markets (though it will stagnate with the far-more practical plug-HEVs) and which I have my doubts that FSD will ever fully accomplish. If one could say that 1 in every 10 households by 2040 is successful with 75%+ rich world mining and general assembly factory by the 2030s, we could certainly see a reduction in labor-intensity – it may even mean a significant dislocation of many of the supply chains that are offshore – a further reverse-globalization (without the industry segregation) – i would applaud that.
Humanoid shapes won’t be good in the long term, but it’s the ideal shape for the next decade or two. Because our current civilization is built for humans.
A humanoid robot can reach any cupboard in your kitchen, use any hand tool you can currently buy, fit through any existing door or hallway, climb any existing staircase or ladder, get into any vehicles and drive it, and operate the controls of any crane or factory control panel designed for humans.
Eventually, all of those will be adapted to other shapes. But for now, we should start with a humanoid shape, human sized, with human-shaped hands.
There is a compounded effect at play as well.
The more they are used, the more examples of input they have. Same as Tesla having an unparalleled amount of training data for FSD.
Failures to accomplish something they are supposed capable of doing are specially valuable, because they will be retrained to do it right with that exception already taken into account.
And I assume they ill allow custom training per profession/activity, by either doing the activity with telerobotics first, or eventually just by watching someone doing the activity.
And a robot in a body that gets used billions of times to do a chore could get much better at it, than one over-designed but barely used.
Unless you need something clearly outside the reach of the generic body, like carrying and manipulating really big things (or really small) or some such. In those cases, yeah, you need something special.
Reasonable. And why aren’t we trying to get these things to hover? How many 4″ props would you need to lift a 40kg (a way to go) android? Maybe 50 (with the 50g each of 30min power)? Maybe line each appendage/back and have a supplemental head mount.
That Ex Machina music whilst viewing the bots is creepy.