

Pittsburgh-based Astrobotic is shooting for the moon and the $20 million Google Lunar X prize. It developed the solar-powered Griffin landing module and a smaller Red Rover wheeled explorer as one of a handful of entities hoping to win the prize. But Astrobotic developed the larger, heavier Polaris lunar rover to explore one of the moon’s poles and to drill for water.
The Polaris rover, which when it lifts off aboard the Spacex Falcon 9 rocket will weigh about 518 pounds and carry sophisticated imaging equipment, carbon-fiber and composite material, other payload and a drill to search for the water that scientists believe is buried in the lunar surface.

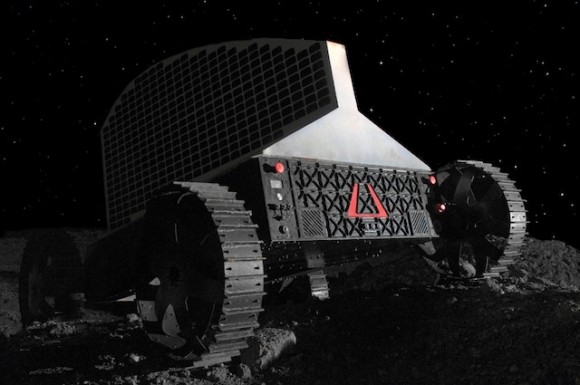
Polaris, the Astrobotic Technology, is rolled out of a lab in Carnegie Mellon University.
Polaris has three vertical solar panels to generate 250W of power and two radiator panels to reject excess heat. Stereo cameras and laser are used to guide Polaris and generate 3-D video and models of the lunar surface. The robot communicates directly with Earth using a pointed S-band antenna to receive commands and send video and data. Polaris carries up to 175 lbs (80kg) of payload, such as a drill to take core samples and science instruments to identify water content. Polaris is capable of driving and avoiding obstacles autonomously including traverses into dark regions in the lunar pole’s long shadows. Polaris suspension includes raise and lower capability to vary chassis ground clearance to lower for drilling and raise for driving on rough terrain. The suspension maintains four-wheel ground contact over sloped and rocky lunar terrain without the use of springs. Surface operations are carefully preplanned to maintain unobstructed views of the sun for power and the earth for communication.
Lightweight Excavator
Excavation on the Moon enables compelling planetary exploration, science, and regolith operations on the Moon. Efficient soil moving are essential to lay the groundwork for future human colonization by preparing terrain and mine ice and other volatiles. Astrobotic Robust, lightweight, and productive lunar excavation robots effectively address this need.
Low mass machines in low gravity environments can only produce limited traction with which to generate the substantial forces to dig dirt. Astrobotic’s innovative low-mass design incorporates a bucket-wheel, a high-volume dump bed, and composite materials.
* The bucket-wheel keeps excavation resistance low by taking only small bites of regolith at a time. High production is maintained by taking a large number of these small bites repeatedly.
* A high-volume dump bed increases an excavator’s payload ratio (ratio of weight of regolith carried to empty robot weight). This pound-for-pound regolith moving capacity governs the productivity of small machines.
* Composite materials, such as carbon fiber and Kevlar, provide significant strength and stiffness to mass advantages over metal structures, dramatically reducing mass.

Structural and Thermal Composites for Planetary Rovers
Structural and thermal composite materials solve a fundamental space robotics problem. Lightweight, stiff structures have a cascading effect reducing actuator loads, power loads and increasing payload ratio. This effect is compounded further when multi-axis manipulators or mobility is considered. Implementation to date is often limited to quasi-isotropic composite plate and tube, commonly known as “black aluminum”. Integrating tailored composites early in the development of robotic platforms achieves game-changing mass reductions. Composites play a key role in thermal systems of lunar rovers, which are exposed to temperature extremes ranging between -175°C and 120°C. Thermally conductive composites are used for lightweight thermal management of sensitive components. Composite structures and thermal components are mission enablers for Astrobotic spacecraft. Components are numerous and far reaching such as rover chassis, I-Beam, thermal strap, battery case and wheels.

If you liked this article, please give it a quick review on ycombinator or StumbleUpon. Thanks

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.