

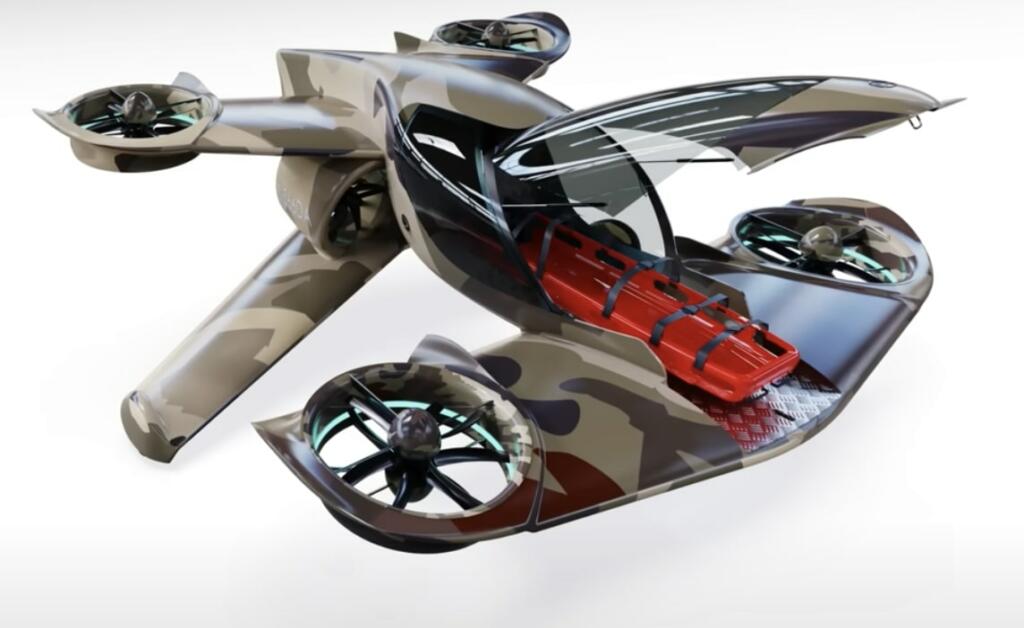
The Doroni H1-X is a design for new two-passenger eVTOL that sets new standard for efficiency, sustainability, and versatility in air mobility. A full-scale system will have test flights by the end of this year, 2024.
Doroni has $3.8 million in funding. The Doroni H1-X is an electric flying car that has an estimated cost between $300,000 and $400,000.
Key Specifications of the H1X:
– Range: Up to 60 miles, enabling substantial urban and semi-urban commutes.
– Flight Time: 40 minutes of operational flight time on a single charge.
– Charging: Rapid recharge capabilities, achieving full charge in about 20 minutes.
– Takeoff Weight: A total takeoff weight of 1850 pounds, including a 500-pound payload capacity.
Innovative Technology & Features:
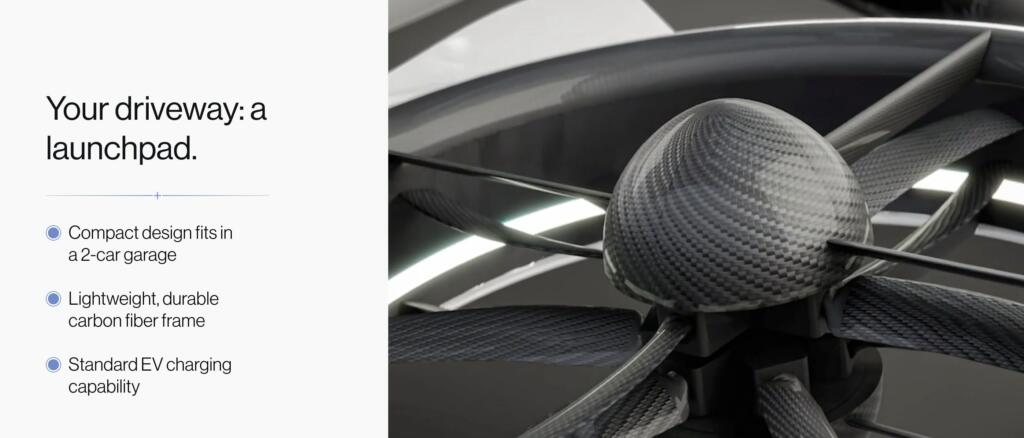
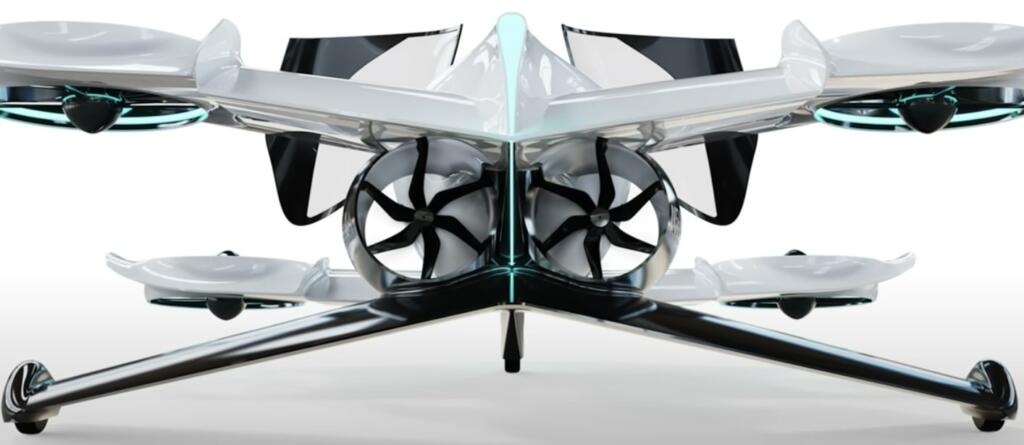
– Patented Ducted Fan Technology: Ensures quiet operation and enhanced safety, making the H1-X ideal for urban environments.
– Advanced Safety Systems: Including a ballistic parachute, offering unmatched safety standards in the eVTOL category.
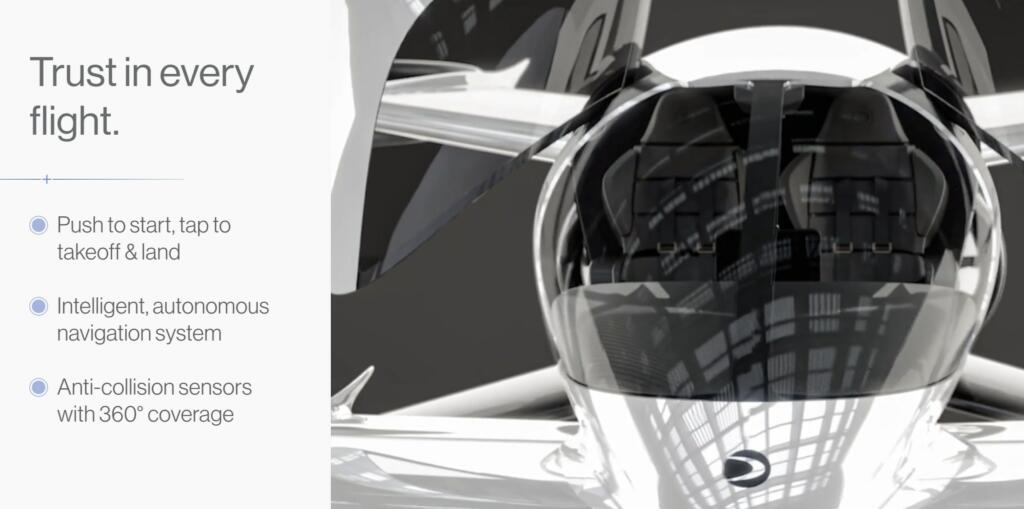
– Intuitive Flight Controls: Designed to make flying as accessible as driving, with a self-stabilizing flight system that opens up air mobility to a wider audience.
– Sustainability at its Core: The H1-X is part of our commitment to reducing urban congestion and emissions, leading the way to a cleaner, more connected future.
Versatile Use Cases:
The H1-X is engineered for adaptability, catering to a wide range of applications from cargo delivery and emergency services to military operations, showcasing its potential to transform not just passenger travel but also critical logistics and support services.





Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.
Another one, with the same inevitable result.
The “flying car” has been around since the first practical helicopter went into production. The main differences between a helicopter and the archetypal “flying car” are not in its propulsion or noise level, but in pilot training required to operate it with minimally acceptable safety and airspace control requirements. It takes about 500 flight hours of training to make a helicopter pilot, and it costs about $1000 per hour. Even if one gets it down to $100k per pilot, it is still a tiny market of pilots. Car drivers are produced by the millions each year at the cost three orders of magnitude less. Incidentally, a car for the masses costs one~two orders of magnitude less than a cheap helicopter ($25~30k vs $500k~$1M). Helicopters are made by hand to this day because production volume is insufficient for robotic assembly line. So there is your market limit: human pilot. Without removing that design constraint by implementing FULL autonomy and airspace control, there can be no flying car. Also, such a flying car would be more of a personal taxi than a car, as there will have to be constraints on what it does in the air, basically, from A to B on the defined trajectory (as in Star Wars, Coruscant sky traffic), strictly no “freestyle” piloting. Creating an autonomous control system at that level is outside the state-of-the-art at this time, and for a number of reasons it will remain so. Therefore, when one sees another “flying taxi” or car hot out of the designer’s 3D editor that explicitly scoffs at aerodynamics, telling you stories how their latest motor or fan or “design” will change everything, they are lying in your face. More so in case of “taxi”, as no one will want to ride the taxi with previous passenger’s various bodily discharges inside, which is inevitable with the absence of taxi driver. So it can only be a “personal taxi”, or a “flying limo”. Which fits the target price range of the current airframes – low $100ks. People who put down that kind of money for a ride, expect to be handled with care and delivered safely. That is another constraint in these projects: they are flying software, and a lot of it, an awful bloody lot of it, riddled with uncorrectable defects due to unmitigated expansion of technical debt, which is a nice way of saying “bad design”. A typical “good” embedded software team releases about 1 defective line of code per 1000, bad ones (open source and other mongrels) make 50 defects per line of code. A flying car today would have between 100M and 1B lines of code in it, which means, optimistically at 10 defects per 1000 lines of code, between 1M and 10M defects in software that literally determines if passenger will live through the ride. Not to mention legal consequences if the thing drops and kills someone else – based on Toyota case, that starts from $1B. Add that to the business plan and the next hype speech for investors, and they will through shoes at such a project, not capital. Or don’t mention it, take their capital, burn it on lifestyle company and then say it did not work out, but definitely next time. Either way, no flying cars until the constraints are removed, and they are not even realised.
It’s almost as if pathologically optimistic ‘tech bros’ are underrepresented in high technical places, below the politically appointed positions of the bureaucracy. I see parallels between the flying car, full self driving, molten salt reactor ‘conspiracies’ that “keep these natural developments suppressed” according to the tech bros.
In reality, what you said: regular people will not be allowed to pilot cars overhead, you will continue to be responsible for collisions in your moving vehicle, and we shall not pursue overtly hazardous power generation technology.
The self driving may eventually come to be; it is less far-out than kamikaze flying cars. The benefits of flying cars and MSRs are not as ‘clear’ as the case for SDC.
By the way, Texas is opening up to air taxis as we speak:
https://www.flyingmag.com/boeing-self-flying-air-taxi-venture-wisk-aero-sets-plan-for-texas-service/
Gradually, then suddenly…
It will start slowly, and then ramp up.
Gradually, then suddenly.
Took Musk years to do what everyone said couldn’t be done. Reusable rockets? What a joke. An affordable BEV (Model 3 & Y)? Not gonna happen.
Yeah, about that…
Air taxis first, flying from urban cores to airports. Then from commuter sites (ie suburban train stations) to large centers of employment. Then onward to stadiums and large hotels.
Computational power will keep increasing exponentially, along with AI. Computers and software will do the maneuvering, not Air Traffic Controllers. 8 lanes of air traffic – N, NE, E, SE, S, SW, W, NW – each lane separated by 300′ vertical.
Most modern commercial airliners fly themselves using radio beacons on the ground and GPS signals. The pilots are just there to handle emergencies.
Radio beacons and GPS are easily transferrable to commuter air taxis. Powerful sensors and powerful computers that are reliable and lightweight will easily be incorporated into air taxis.
When the technology has proven out, the general population will be allowed to own/lease one just like an automobile. Just as trillions of dollars have been spent on Interstate Highways over 70 years, Trillions more will be spent on aviation highways.
Cash strapped municipalities and counties will welcome this. Unlike roads, bridges, and highways, there will be no maintenance costs. Airspace is free and abundant.
see my reply to Marcus
Actually IceGuy, there’s another festering problem. Energy-efficiency. This one doesn’t have any “magic” to make go away. Its a physics problem.
Suppose — in the worse case — that you’re just in a lawn chair, hovering a hundred feet up, not going anywhere in particular. Sight seeing. Right.
Your helicopter-by-any-other-name is blowing wind furiously downward, in order to extract enough force upward, to keep yourself up there for awhile, or until the batteries run out.
Total distance, ZERO.
Total power, whatever it takes.
Not something small like fits in your cell-phone.
Kilowatt-hours per mile?
Mathematically infinite.
Terrible.
Obviously that’s the worst case.
If, on the other hand, you’re zipping along to another donut-and-cappuccino-stand in mind, at oh, 100 km/h (which is what 60 MPH is, after all) And by awesome good design you have a 100 kWh battery (presently weighing in at 1200 lbs) that’ll last the 40 minutes at 150 kW to keep the fine Italian designed Doroni Bird aloft, well, its only what, 100 kWh divided by 60 km or 1.6 kWh per km. Yay!
In perspective, your (almost ridiculously heavy) electric car, at least 1800 kg for smaller ones, uses the same 100 kWh battery to go (360 mi × 1.6 = 575 km). Thus taking only 0.174 kWh per kilometer. Yay!
So, the aero-flitter takes almost 10× the power to get between points.
No. 10 times the ENERGY. One tenth the energy efficiency of a ground vehicle.
Now — how do you think that’s going to go over in the upcoming Green Revolution conventions? Not so hot, is it. We might as well start burning trees to power the ornithopters.
AND THE PROBLEM is that as long as the “design goal” of our fine Italian Flitter is, well, to flit around in an ornithopter-cum-helicopter /aka/ no-wing flyer configuration, having “only 10×” higher between-points power consumption is actually quite good!
By the time lawsuits, lawyers, regulating agencies, congressional inquiries, and well … the down-side of falling-out-of-the-sky incidents has its engineering effects, the things will weigh at least as much as a car, and will have backups-to-backups, multiple redundant systems. And they’ll still crash into each other like flocks of winter berry-drunk ravens, given both human caprice and the unerring ability of computers to F everything at random, every chance they get.
Nope. Your positive countenance is admirable.
My goatish skepticism — sorry for the bucket of black paint — is very real.
⋅-⋅-⋅ Just saying, ⋅-⋅-⋅
⋅-=≡ GoatGuy ✓ ≡=-⋅
Exactly.
If an EV runs out of juice, you simply pull off the road and call fro a tow.
If a FC runs out of juice, you fall onto the road and die, maybe taking a bunch of people with you. This is so obvious that even dense regulators will get it beforehand. I’m surprised they aren’t regulating this thing out of the skies already. I guess they don’t want to kill a nascent industry, but they will if your imagined urban/semi-urban innovation starts to look real.
Ironically too, the scarcity of landing ports due to low demand, will make the possibility of crashes while waiting – or refusing to wait – for a desperately needed landing spot in cities, even more likely.
This has disaster all over it.
And none of the designs are really flying cars anyway. They barely fit in a lane, and are only semi-drivable e-copters with too little redundancy, range, and payload, and too much cost.
Like planes, helicopters don’t actually fall out of the sky when they run out of juice. The spinning blades function as wings and extract energy from a fall, generating lift. The same can be done with electrics.
Wishful thinking, Ralph.
FIRST, for auto-rotation to generate ‘lift’, the whole craft needs to be falling thru air at an appreciable velocity. It is far more accurate to say that a falling helicopter has a finite descent rate, limited by the counter force of the auto-rotating blades.
Or, put differently, if to keep a helicopter hovering (going nowhere, just hovering) takes a slipstream of say 25 m/s of the entrained air nominally, then the free-fall helicopter needs to be falling at least at 25 m/s to generate sufficient autorotation counter-force to cap further acceleration. Its physics.
The problem there is, that if you’re not flying high enough to start with, your failed helicopter can’t fall fast enough to get an appreciable autorotation counterforce going. Rotors have significant inertia and momentum.
One thing works in the scrambling pilot’s favor though: as you’re rapidly approaching the scene of the crash, the rotors can be pitched at a steeper cut angle, generating HIGHER braking force with their stored rotational energy. So, instead of crashing at 50 to 100 miles per hour, you can be quickly slowed down to maybe 10 to 20. Survivable speeds. The helicopter is a crumpled mess however.
Note though that this assumes high enough altitude flights. If they’re low-to-the-ground (as many ‘flying taxis’ are imagined), there’s no time to spin everything up as hoped for.
So, you crash. Tada. A glorious end of the journey.
By the way, your assertion that the electric motors of a multi-rotor-copter could be asked to perform a similar way is exactly wrong: the rotor blades of a ornithopter don’t have variable pitch blades. Variable speed, yes. Pitch, no.
As such, they definitely would spin up — if you have the time — after the rotors stop and reverse direction. However, once the power is lost, there’s no way to develop that extra push by pitching the blades at the last second to brake the terminal velocity fall.
So… wish on, Ralph.
Physics is a harsh mistress.
Especially for flimsy aircraft maneuvering one-off actions.
⋅-⋅-⋅ Just saying, ⋅-⋅-⋅
⋅-=≡ GoatGuy ✓ ≡=-⋅
You may have missed the line about it being equipped with a “ballistic parachute”. They’ve been building whole (small) plane parachutes for some years. Which should mitigate the falling out of the sky issue.
But to me ballistic is a reference to an unpowered flight path, so, no, I don’t know what they mean.
Ballistic parachute means the parachute gets shot out to launch it. Quick and effective.
Oh please… We have enough trouble dealing w/transport on a 2D surface, like a road. We still can’t get THAT very clean and seamless. Can we? Flying cars? Really? Lets look at how such things would be controlled. Your talking about a 3D environment were thousands of vehicles are trying to come from someplace to go somewhere. Our current air traffic control is just not capable of dealing w/level of data. This makes “flying cars” :stupid” in the forseable future. Sorry, I wish it was not so
I suppose it’s less the technology but how we deal w/it that matters. And that makes the “tech'”, though possible, just nothing beyond the cartoon “The Jetsons”.
With good radar and/or location and trajectory sharing, this seems like a trivial problem to a non-expert. Something AI controlled nav could easily handle. What am I missing?
Imagine an ice-puck on an enormous perfectly flat frozen pond.
The puck is YOU.
You have exactly no brakes …
No bumpers worth anything …
No controls except something that’d let you ‘spin’ and ‘thrust’.
That’s it.
Now, pack our lake with oh, tens of thousands of these little pucks. Each one has a bloke or lass in it, trying to get somewhere on the lake, as fast as is reasonable. There are thousands of piers on the lakefront to start from, to arrive at after the trip.
The added fun is that if a puck runs out of power, it melts thru the ice and falls to the bottom of the lake, to be fished out next Summer.
The relatives become SO annoyed.
The larger annoyance is that ALL puck traffic is — obviously — legislated to STOP until such time as Congress can hold Hearings and determine who the Idiots were that authorized these death traps to traverse the otherwise pretty lake.
THAT … in a nutshell, is it. Complexified by having 3 dimensions and no icy support surface. Everything else is just the same. No actual brakes, buffeted around by every whim of the wind, and falling to earth like a pretty festooned tûrds, should they run out of power. And very likely in a system of un-eliminatable chaos-traffic that virtually guarantees mid-air collisions and unsightly tûrd-falls. And Congressional boards of Inquiry. And lawsuits, lawsuits, lawsuits, and more lawsuits.
This — we imagine? — is a field ripe for innovation?
Color me purple and call me an Eggplant.
It ain’t happening.
Period.
⋅-⋅-⋅ Just saying, ⋅-⋅-⋅
⋅-=≡ GoatGuy ✓ ≡=-⋅
Seems like drone tech is pretty advanced these days and will get passengers soon. Not sure why you think there are no brakes. You just flare into it to stop or change direction. AI will make excellent autopilots, like for boats but in 3D. The innovators will not stop for the naysayers. Adding range extender generators is an obvious near term solution.
When all else fails, invoke magic? “Adding range extender generators” … LOL. And what about the attendant mass, mass, mass and more mass.
Fuel mass, engine mass, generator mass, fire-suppression mass, airframe support mass, and parasitic mass from having to re-engineer the whole flying taxi with additional strength to … support all this mass, PLUS the mass of the improvement!
Oh, that. Magic! Wäve the wand around. More magic, faster!
Innovators will fix it! Ye naysayers are a dying breed!
Mmm, hmmm… Note that virtually no one owns a private plane, today. Could have, if the advertising copy from the 1960s was worth anything. Wasn’t the naysayers that stopped it. Was the fact that the FAA wouldn’t let anyone try to fly that didn’t pass its battery of tests and certifications. And the aircraft had to be WAY more mechanically sound, with redundancies and emergency survival equipment than would make aircraft as cheap as motor-cars.
I suppose the dream is “but with AI, no one will need to talk like a pilot, or actually fly the craft at all”.
Mmmm, hmmm… Sure. Sorry. I don’t agree.
⋅-⋅-⋅ Just saying, ⋅-⋅-⋅
⋅-=≡ GoatGuy ✓ ≡=-⋅
Anyone can learn to fly. It’s especially simple for experimental and lightweight aircraft.
Less batteries makes more payload available for lightweight turbine generators, fuel etc. Hybrid is the way to go. And if added weight is a problem, go bigger.
Not sure why you think autonomous drone tech can’t add passengers. Perhaps it’s something along the lines of “lock everyone down for safety”.
As the blurb states “Intelligent autonomous navigation system” and “anti-collision sensors” — no magic needed, just ready-to-go technology.
Again, if we invoke magic … to solve the wee-bit-harder-than-you-say skill of aerial navigation … then we might as well deploy it for everything.
You made (well made!) a point which I’ll paraphrase: “just lose most of the heavy batteries, and replace with compact jet fuel powered turbine genset”, as hybrid is really the better way to go.
I don’t disagree! It isn’t even obvious why one might need batteries at all. Generator → motors directly. Big lightweight super-caps with infinite charge-discharge cycle lifetime to solve “surges” problem. Externally it looks the same. To please “the Green-conscious investors and marketing committees”, have to have a heluva good muffler on both the turbine intake and exhaust. Quiet as a mouse, when sitting still.
That didn’t require magic.
Question is though, what really is the advantage of a super-sleek-and-futuristic Italian Designed flying device over something much less sexy, and far more … ahem … helicopter based? In the end?
Why I point this out is because of a remarkably well conserved principle in Physics: for a given force, the more air you can move, the more slowly you can move it, the less power it takes to MAKE that force.
This is the principle that has been used again, and again, and again in the last 30 years (or more, really) in “improving jet engines” for all kinds of commericial aircraft. The larger the turbofan bypass, the slower the slipstream needed to deliver a given amount of thrust. More mass moved, slower = same thrust. The POWER goes down because of
[1.1] Ek = ½mv² … and
[1.2] F = ma = mΔv/Δt
(and by proxy F = mv, for Δt = 1)
Note that force depends linearly on the product of moved mass and its velocity. But the energy depends on velocity squared times mass. That v² business really eats up more power for lower masses.
All this is in the context of “why a little sexy Italian flyer”. Keeping the swept area (those rotors) basically tiny (which they are!) requires that the engineering team ask them to displace a LOT of air thru them, necessarily at a HIGH velocity. Thus making the contraption particularly inefficient energy-wise. Contrast that to a similar sized airframe with a nice hefty helicopter set-of-blades above it. Swept area is 10× or more larger. The corresponding higher mass need be accelerated downward at ¹⁄₁₀th the speed (for about ⅕ to ⅛th the energy investment) to deliver lift.
________________________________________
I’d expect that you’ll object along the lines of “its supposed to be something that can alight in your home’s driveway (see picture above), or in the center of a city to drop VIPs off to work (massive LOL)”.
Its not supposed to look like a 60 year old helicopter! Italian designs RULE baby! Get outa here, Goat!!!
Yah, OK. The narrative thus ends. Good old Father Physics guarantees that this Italian Electric Runway Model (sorry, couldn’t pass up the pun) will be an energy-consumption beast, will be CRAZY noisy, and won’t be allowed anywhere near your neighborhood to pick up passengers or drop ’em off with the noise it’ll make. NO CHANCE.
Except in Texas, and other unafraid-of-wickedly-loud-noise tolerating communities.
Even if screaming like a banshee, for the few minutes one will stay aloft, it’d be a heluva fun ride!!! This I will not debate. Even if it is intrinsically dangerous. Who cares! Live dangerously!
Why even do we mandate seat-belts then? D’oh…
⋅-⋅-⋅ Just saying, ⋅-⋅-⋅
⋅-=≡ GoatGuy ✓ ≡=-⋅
Radar, and other sensors need to be very “plyable”. And far more finite then they are (to my knowledge) now. Also radar and “location” data are still only in the end as good as the people who deal w/that data. As for AI? I hope it’s as good as the hype. But today, I wouldn’t trust it to make me a “perfect” cup of coffee every time. I wouldn’t expect a person to make it “perfect” every time. Then again, if I don’t get a “perfect” cup of coffee, planes don’t crash into each other.
This may sound like a unrealistic, simplistic set of variables to judge AI. Really? If it’s not “as perfect as possible”, people can die. My cup of coffee be damned.
Exponential AI progress is happening but even so, autopilot AI isn’t necessary, regular algorithms and computation will do it. For example, drone swarm control is already here, which can likely be applied to air traffic lanes, press a button to join etc.
I’ve been shopping for autopilots, radar, AIS, navigation software with weather routing, etc for my boat today so the topic is kinda fresh. Totally doable. Plus I’d like to fly those things, will be rad. Though I’m sure it seems scary and impossible for non-pilots 😉
I hope you find what your looking for. We all do. But we need to be so sure or the consequences will be very serious. Oh, by the way I am a pilot who used to fly a Gulfstreem-4 for my own company. That was cheaper then having to hire a co-pilot.
Ahh so you have some entrenched thinking. I was just into paragliding and speed flying so can’t comment much on the aviation version of Automatic Identification System broadcasting heading and velocity data every few seconds, though surely it exists to ensure autopilot coordination, apart from remote satellite swarm control possibilities. My boat project is actually mainly about new product development so far but I always have VTOL in mind too. Imagine if the Wright Brothers listened to the naysayers.