
NASA NIAC has funded the development of a next-generation SmartSuit spacesuit which will use soft-robotics technology so astronauts can be more mobile and better interact with their surroundings.
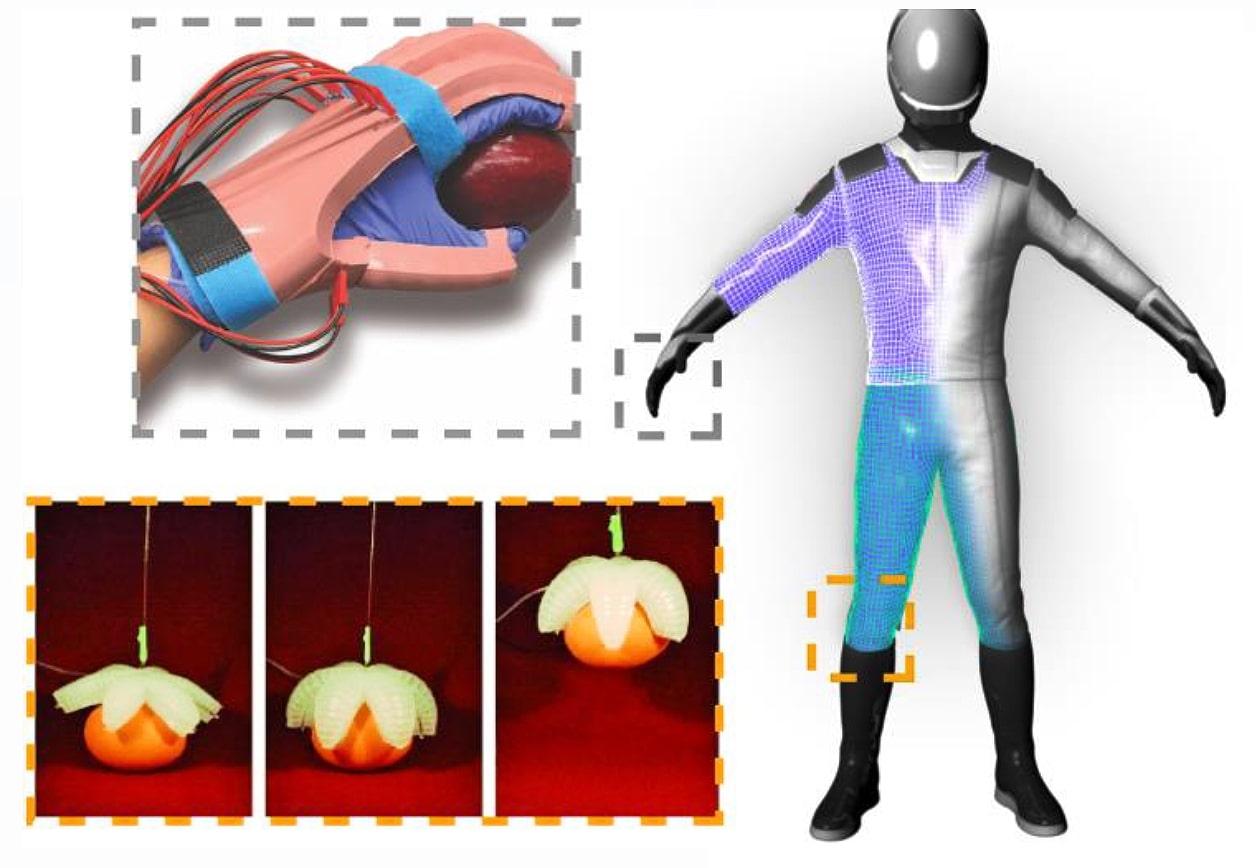
The spacesuit will have a soft and stretchable self-healing skin (or membrane) located in the outer layer that not only protects the astronaut but also collects data through integrated, transparent sensors embedded in the membrane. These sensors are capable of visually displaying environmental and membrane structural information, providing visual feedback to the wearer about the surroundings.
The hybrid and intelligent spacesuit proposed will be designed with the philosophy of enhancing motion and dexterity, reparability and sensor integration to interact with the soundings and detect damage. The proposed hybrid technology adding full-body soft robotic elements to the gas-pressurized spacesuit will enable enhanced dexterity, increased comfort, and a feeling of normalcy that will facilitate both scientific and exploration operations on planetary missions like those expected for Mars’ surface. Additionally, the soft-robotic layer has the potential to provide some level of mechanical counter pressure (MCP) to the wearer, thus decreasing the gas-operating pressure within the suit, therefore reducing the time needed for pre-breathing protocols while enhancing even more the mobility, which has a direct impact on the duration, metabolic cost, and fatigue associated with an EVA.
They expect the proposed spacesuit technology to reduce the numerous spacesuit-fit injuries and discomfort experienced by present astronauts due to the current highly pressurized spacesuits with no robotic assistance. The proposed spacesuit significantly improves on the state of the art in spacesuit design, addressing many issues in surface mobility, reparability and re-usability, safety, EVA preparation time, EVA duration time, and both physical and psychological fatigue. The Phase 1 effort constitutes advancement of this concept from TRL 1 to TRL 2.
The proposed project will investigate the trade-space of materials and sensor architectures, leading to design principles and sizing estimates of a candidate spacesuit. They propose to prove its feasibility and whether SmartSuit will achieve the science and exploration objectives articulated in the current Mars Design Reference Architecture 5.0. At the end of the phase I, they will outline the SmartSuit system design and concept of operations, including rationales for material, sensor, and display technology selection. It will also detail the layer breakdown and composition of such a suit. PI Diaz Artiles will lead the mission architecture work of this study, including a comprehensive biomechanical and human performance analysis. Co-I Shepherd will analyze material and mechanical metrics for manufacturing the SmartSuit and will also perform preliminary experimental validation of its core concepts (i.e. joint torques and MCP measurement, basic locomotion, relevant environmental sensing and display, and environmental stability).

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.
Aside from the eight to forty minute latency :).
It is a proposed first mission (or maybe first few missions) to Mars, to achieve important pre-colonization exploration goals on a whole-planet scale, while also testing out the riskiest component of getting humans to Mars surface – namely Mars landers that can re-launch.
One major exploration goal would be site selection for a human base – investigating sites considered ‘likely’ to have desirable resources. There might be a sample return mission or two, since that’d be a good way to test the ability to return to orbit.
I think you underestimate the risk-aversion around human space flight. It makes no sense, especially since the same politicians who are wary of being blamed for a few astronaut deaths are generally the same who have few qualms about sending our armed forces into mortal danger. Maybe we need to declare war on space – sorry, I mean “approve an open-ended authorization for use of force” to pre-emptively deal with the space-terrorist threat.
Just for clarity, these ideas are to further the current primary goal which is the establishment of a human base on Mars and not an exploration mission?
I’m surprise you have to ask that question, look around the modern world and you will see that cost benefit equation in action.
I’m not saying it’s right, but human well being is always secondary to cost considerations. It’s accepted practice in some circles and to varying degrees that humans are just grist for the mill that is business, short of outright butchery.
Your conjecture is baseless. Few have proposed tele-operated robotics as a key to Mars exploration, let alone as a primary enabler of the first human missions to Mars. I seriously doubt we’ve had much impact on NASA policy, negative or positive.
There has been an on-going “discussion” within NASA over the relative value and cost effectiveness of robotic probes vs. human explorers, but the human exploration budget has always been a healthy chunk of NASA’s budget – larger than that spent on robotic probes.
The timidity and lack of a long-term vision for NASA’s human exploration program has wasted decades and billions of dollars. Instead of a lunar base or a steady build-up to a Mars mission, we got a tinker-toy white elephant in orbit and a fragile, barely reusable, over-sized and now-defunct ‘space truck’ with a fraction of the payload of a Saturn V. Plus a bunch of false starts that have cost even more billions and decades, of course.
Early 2000’s technology Mars robots handled Mars surface pretty well. A new generation should do much better and add high-fidelity telepresence with arms and hands (and ideally legs) able to closely match the durability, speed, dexterity and tactile/somatic feedback of their (shirt-sleeves environment) human controllers – and exceed their strength.
If all you care about is that the bodies still be warm by the time they get to the surface, I can pretty much guarantee that whatever is left of those bodies after you ‘roll the dice’ will be quite warm. Does that sound callous? I’m not the one suggesting we play dice with human lives…
As for “too expensive”, I think you’d need to explain how creating a system that can land humans safely on Mars, keep humans alive on Mars, and get living humans back to Mars orbit, would be cheaper (let alone ‘easier’) than a system for landing machines that mainly need a power supply to survive and operate on the surface.
Otherwise the system costs are about the same – the same hab used for Mars transit would serve as the Phobos base. While we’d want it to be sturdy – ideally able to simulate gravity with rotation, and we might decide to make some use of Mars atmosphere aerobraking to save fuel mass – it doesn’t need to survive the rigors of landing on Mars.
There is a small increase in fuel mass to circularize and rendezvous with Phobos – but launching more fuel and bigger tanks is relatively cheap compared to space system development costs.
And if we want, we gain the option to spend a fraction of the savings from this approach to explore Phobos – since we’ll probably site the base at the Mars-Phobos L1 point, only 1.6mi from Phobos.
Total conjecture, but Id wager you guys and your “oh teleoperated robots are the key to Mars settlement…blah blah blah…” are the ones slowing down the expansion into space. Decision makers hear that and drag their feet, waiting for these perfect modular robots that can do a humans work in all the rugged and unpredictable Martian terrain, forgetting that the robotics don’t necessarily advance how you want them to without the effort/investment backing up stated goals.
We already have some of our best robots on the surface of Mars and while they’ve done excellent work, every estimate I’ve ever heard says a human could do their years of work in a day. SpaceX people have mentioned that even getting robots to unpack and install the solar for refueling SS required massive investment. Sure teleoperation may make this easier but if you’re developing human systems for exploration settlement anyway, it might make more sense for the initial human surface crews to start developing and deploying varieties of modular robots based on the encountered terrain.
That approach is too expensive, easier and cheaper to roll the dice with a couple of warm bodies.
Yes, this is the usual sort of response I get. People are so attached to the SciFi vision of humans wandering around on Mars surface in space suits, that they reject an approach that can be done sooner, safer, cheaper and more effectively.
We will eventually put humans on Mars surface. Heck, at my age I should be the one pushing for it to be done ‘Mars Direct’ style just so I get to see people landing on Mars in my lifetime.
But if you want more than ‘flags and footprints’ on Mars (with a strong chance of it actually being ‘wreckage and soot’) – if you dream of actually colonizing Mars – we need to do it in the smartest way we can come up with.
With teleoperated robots, we could thoroughly test rockets that can land on Mars and re-launch with minimal ground infrastructure. We could locate resources that will allow a colony to rapidly increase its self-sufficiency. We can test out and improve the tele-robots that should STILL be the primary mode of doing things on Mars surface once humans arrive there.
But tell you what – keep dreaming of humans walking around on Mars surface, doing all the work. That’ll delay the realization of that dream another 20 years on top of the 40 wasted so far. By then robots will be smart enough that we’ll just keep sending them and humans can stay right here on Earth.
A robot would be more vastly more productive than yourself in most areas, yet your wife still keeps you around, almost as if productivity isn’t the only factor.
I’ve long pushed the idea that a person in a Mars suit will be vastly less productive for most tasks than teleoperated robots.
The relative safety of in-person versus remote control is obviously a big factor to consider. Time is lost suiting up and stripping. A human can only carry so much air, and if they carry pure oxygen to extend that time, they may have to add time pre-breathing going out and coming back in. They risk bringing hazardous Mars dust into the hab, requiring stringent and time-consuming dust control procedures that likely won’t be completely successful. Add the need to limit exposure to solar and cosmic radiation on Mars surface, and it looks like a no-brainer.
Once one accepts teleoperation, one may realize that the most effective way to survey a whole planet with relatively few humans is to transport general purpose teleoperated robots to exploration sites, rather than send humans.
And then, one may realize that it’d be smarter to first set up a human base on Phobos (maybe Deimos) rather than immediately land people on Mars. Only send humans to Mars’ surface once you discover life or fossils or a great colony site – stuff that needs people.
VR has had its ups and downs in its short commercial life, but it’s here to stay. It only needs to free itself from tethers and PCs and start recognizing the world around it. The latest Occulus Quest looks like a very nice VR headset and a step in the right direction.
Self contained, untethered, recognizes the room and your position with cameras and positions you correctly in the virtual world. And it has positional hand controls too. The only problem is that it uses a not-that-powerful mobile CPU and GPU, but those things are improving all the time.
I have the Vive, which is a bit old school and by now the novelty has certainly faded.
But I’m eager to try the Quest.
Occulus + Big Dog with Arms > you on the surface of a planet
(potty breaks are more pleasant)