

In this paper, we present experimental results on altitude control of a flying microrobot. The problem is approached in two stages. In the first stage, system identification of two relevant subsystems composing the microrobot is performed, using a static flapping experimental setup. In the second stage, the information gathered through the static flapping experiments is employed to design the controller used in vertical flight. The design of the proposed controller relies on the idea of treating an exciting signal as a subsystem of the microrobot. The methods and results presented here are a key step toward achieving total autonomy of bio-inspired flying microrobots.
Harvard Harvard Micro Air Vehicles web page
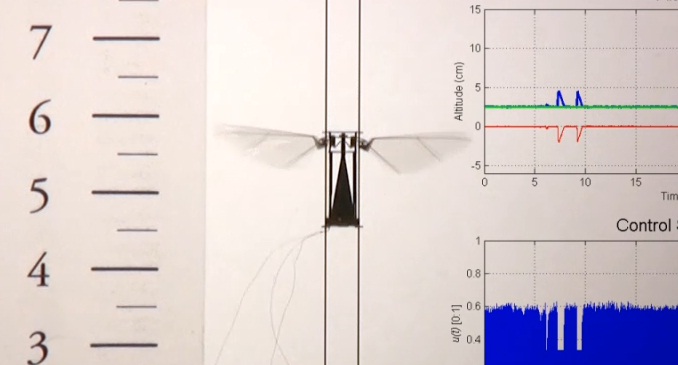
After designing and fabricating a 56-mg flapping-wing microrobot, the researchers attached the microrobot to a double-cantilever beam that could move only in the vertical direction. When the robot flapped its wings, the flapping induced inertial and aerodynamic forces that caused the wings to passively rotate. In turn, the passive rotation created a non-zero angle of attack during the wing stroke, which produced lift. In general, the faster the wings flapped (i.e., the higher the frequency and/or the amplitude of their stroke angle), the greater the lift force.
The overarching aspiration of this project is to combine multiple diverse research topics under the goal of robotic pollinators. By bringing together experts from biology, computer science, and mechanical and electrical engineering, our end product will be much more than the sum of the parts.
The proposed research neatly falls into three aforementioned categories: body, brain, and colony.
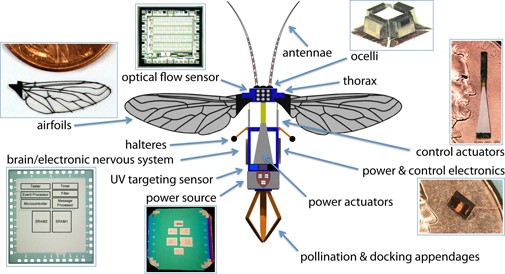
The body involves all aspects of the proposed work that revolve around construction of a flapping-wing robot. We will explore several aspects of free flight mechanics and performance to guide our design of an autonomous robotic bee.
The brain incorporates all of the sensors, control (i.e. algorithms and software), and circuitry (i.e., hardware) to coordinate flight and target identification capabilities of the RoboBees.
The colony encompasses higher-level support required to accomplish objectives of a complex task in a collaborative manner. We seek to leverage the colony as a whole for parallel, energy-efficient, and robust operation.
If you liked this article, please give it a quick review on ycombinator or StumbleUpon. Thanks

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.