

A researcher at Arizona State University has discovered how to control multiple robotic drones using the human brain.
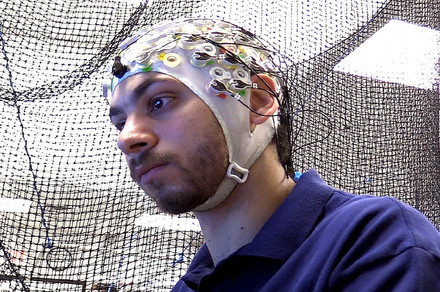
A controller wears a skull cap outfitted with 128 electrodes wired to a computer. The device records electrical brain activity. If the controller moves a hand or thinks of something, certain areas light up.
“I can see that activity from outside,” said Panagiotis Artemiadis (pictured above), director of the Human-Oriented Robotics and Control Lab and an assistant professor of mechanical and aerospace engineering in the School for Engineering of Matter, Transport and Energy in the Ira A. Fulton Schools of Engineering. “Our goal is to decode that activity to control variables for the robots.”
Panagiotis Artemiadis runs the university’s Human-Oriented Robotics and Control Lab, where researchers seek to understand and improve interactions between humans and robots. The lab was awarded grants totaling $860,000 from the Defense Advanced Research Projects Agency and U.S. Air Force in 2014 to build out the mind-control technology.
If the user is thinking about decreasing cohesion between the drones — spreading them out, in other words — “we know what part of the brain controls that thought,” Artemiadis said.
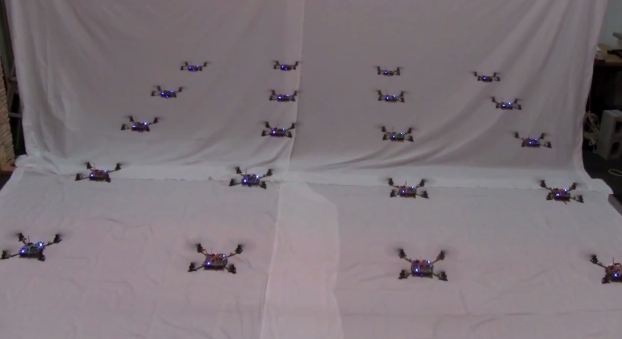
A wireless system sends the thought to the robots. “We have a motion-capture system that knows where the quads are, and we change their distance, and that’s it,” he said.
Up to four small robots, some of which fly, can be controlled with brain interfaces. Joysticks don’t work, because they can only control one craft at a time.
“You can’t do something collectively” with a joystick, Artemiadis said. “If you want to swarm around an area and guard that area, you cannot do that.”
To make them move, the controller watches on a monitor and thinks and pictures the drones performing various tasks.

Artemiadis said controllers have to stay focused. If it’s close to lunch and all you can think about it is pizza, it doesn’t work. Fatigue and stress also play a part. Artemiadis said he can tell when subjects are tired or need a break.
Each subject is different. The system has to be calibrated to individual controllers, and it has to be done every day, because brain signals change from day to day.
The next step in Artemiadis’ research is multiple people controlling multiple robots. He plans to move to a much larger experimental space to refine the proof of concept. In the future, he sees drone swarms performing complex operations, such as search-and-rescue missions.
NBF – It seems likely that Deep Learning artificial intelligence could be used to address the pattern matching and computer-brain calibration issues.
DARPA also working on drones swarms that are autonomously controlled
Officials of the air Force Research Laboratory at Wright-Patterson Air Force Base, Ohio, announced a $3.9 million contract Wednesday to the Composite Engineering Inc. Unmanned Systems Division in Sacramento Calif., for the first phase of the Gremlins program, which relies on relatively inexpensive unmanned aerial vehicles (UAVs) in volley quantities to saturate enemy defenses.
The Air Force Research Lab awarded the contract on behalf of the U.S. Defense Advanced Research Projects Agency (DARPA) in Arlington, Va. Composite Engineering is part of Kratos Defense and Security Solutions Inc.
The DARPA Gremlins program seeks to launch swarms of small UAVs with C-130 utility aircraft, and then use other C-130 utility aircraft to recover as many of these drones as possible. The Gremlins approach would launch swarms of UAVs equipped with surveillance and electronic warfare (EW) payloads beyond enemy air defenses, and then recover surviving UAVs when they have completed their missions.
DARPA researchers want Composite Engineering to develop affordable UAVs that could be reused as many as 20 times for dangerous missions in contested air space like pre-attack reconnaissance and surveillance, as well as electronic attack to destroy or disable enemy communications, missile defenses, and battlefield networks.
These drones would be fitted with diverse payloads in volley quantities, and would have the attributes of small vehicle size, reusability, and limited vehicle design life, DARPA officials say.
Key enabling technologies for the Gremlins program include aerial launch and aerial recovery techniques, equipment, and aircraft integration concepts; low-cost, attritable airframe designs; design for limited life; automated waveoff strategy; precision digital flight control and navigation; aerial refueling techniques; efficient small turbine engines; automated fuel tank inerting and engine shutoff; small distributed payload integration; and precision station keeping.

DARPA is pursuing the Gremlins program in three phases: system and technology design; preliminary design; and prototype flight demonstration.
This first phase of the program is expected to involve several different contractors, and spend about $15.8 million, so there should be other contractors in addition to Composite Engineering.
Ultimately DARPA wants a Gremlins flight demonstration by early 2020 to show the feasibility and potential of air-launched, recoverable unmanned aircraft. Only phase-one contractors will be eligible to participate in the program’s second and third phases.
The program seeks to make a fundamental shift in the notion of aerial attack. Instead of using conventional, monolithic systems to conduct missions in denied environments, DARPA wants to use several platforms with coordinated and distributed warfighting functions to saturate adversary defenses.

SOURCES – Arizona State University, DARPA, military aerospace, Air force research lab

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.